(1)
Ranger-7
Questa sonda merita di essere ricordata, perché fu il primo veicolo spaziale a fornire una gran mole di immagini dettagliate e ravvicinate di una zona nella faccia visibile della Luna.
IL PROGRAMMA SPAZIALE RANGER
Nella guerra sull'esplorazione spaziale che si accese fra gli Usa e l'Urss dal 1957 in poi, il JPL rivestì un ruolo essenziale nella definizione del programma esplorativo nazionale. A fine Ottobre 1957, l'istituto californiano propose un progetto denominato “Red Socks”. Era previsto di inviare almeno nove sonde verso la Luna con delle missini molto ambiziose: otto sonde sarebbero stati dei piccoli satelliti della Luna, mentre la seconda sonda doveva prendere immagini della faccia oscura della Luna e tornare addirittura sulla Terra. Vista l'estrema complessità del progetto, ne venne definito un altro più specifico e fattibile: porre cinque satelliti in una qualsiasi orbita lunare. Era il progetto Able, approvato nel Marzo 1958. Inoltre come risposta al "successo" di Luna-1, la Nasa approvò anche il progetto Vega che mirava ad esplorare la Luna, Marte e Venere. Ma però l'ente spaziale l'11 Dicembre 1959 per vari motivi, fra i quali la scarsità di fondi e la mancanza assoluta di vettori adatti, cancellò il programma Vega. Con la costruzione dei nuovi Atlas–Agena si potevano lanciare fino a 340 kg di "carico" in una traiettoria di fuga. Così nel Gennaio 1960 il JPL di Pasadena presentò il suo nuovo programma d'esplorazione lunare: Ranger [‘‘misuratore’’].
Una navicella Ranger avrebbe utilizzato una piena stabilizzazione sui tre assi, cioè il veicolo spaziale era "istruito" nel mantenere i propri assi principali orientati in direzioni fisse nel cielo mediante l'uso di ugelli che spruzzavano azoto gassoso. Queste nuove sonde erano capaci di eseguire una varietà di missioni lunari e planetarie utilizzando ‘‘carichi" [payload] alternativi da montare alla sommità di una navicella base. Inoltre il vettore di lancio doveva adattarsi ad un nuovo "concetto": l'orbita di parcheggio terrestre. Questa tecnica permetteva di lanciare in più efficienti traiettorie lunari e planetarie il massimo del carico. Un razzo che utilizzasse l'orbita di parcheggio terrestre doveva avere un secondo stadio che si accendesse due volte. Infine il concetto di navicella pienamente stabilizzata su tre assi dava i seguenti vantaggi:
1. massima produzione di energia dal ‘‘puntamento’’ [in gergo pointing] dei pannelli verso il Sole;
2. massima capacità delle comunicazioni nel puntare un'antenna ad alto guadagno verso la Terra;
3. un sistema coordinato sia per le manovre di correzione della traiettoria che per l'orientamento finale;
4. gli strumenti scientifici, che richiedevano il calcolo o controllo della direzione, potevano eseguire le loro osservazioni.
DEEP SPACE INSTRUMENTATION FACILITY
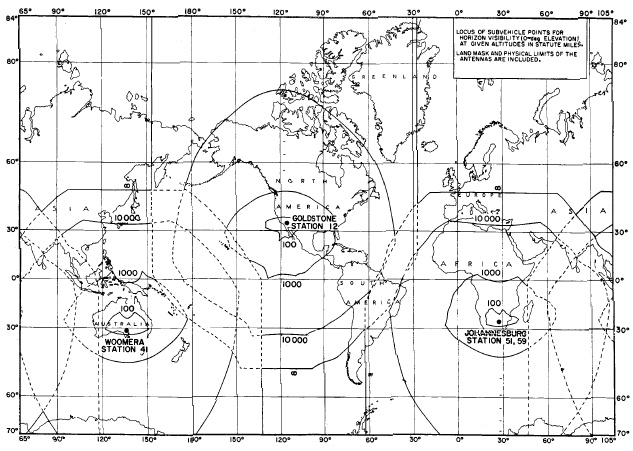
La Nasa — fin dalle prime missioni Ranger e Mariner — utilizzò varie ‘‘costruzioni’’ [facility] in grado di comunicare con i veicoli spaziali senza equipaggio, lontani almeno 16.000 km dalla Terra. Praticamente venne istituita una ‘‘rete’’ [network] di "stazioni" [station] distanziate fra loro di circa 120 gradi in longitudine. In questo modo, una sonda era/è sempre entro il ‘‘campo visivo’’ [field of view] di almeno una stazione. Ognuna di queste era denominata DISF [Deep Space Instrumentation Facility, ‘‘Costruzione Strumentale per lo Spazio Profondo’’].
Il ricevitore collegato ad ogni antenna DISF doveva essere capace di raccogliere il segnale trasmesso dallo spazio. Inoltre era necessario separarlo dai molti disturbi di varia natura (in gergo statica). Oltre all'atmosfera terrestre ci sono anche le altre fonti di disturbo: lunari, solari e galattiche. I ricevitori di una stazione DISF avevano un bassissima soglia (il punto oltre il quale non si può "udire" il segnale). Per definizione ogni ricevitore radio vede la sua sensibilità intrinsecamente "afflitta" dai disturbi generati dagli stessi dispositivi elettronici che lo compongono. Per questo furono (e sono) introdotti metodi per amplificare il segnale, sia nel momento della trasmissione dalla sonda, che della ricezione sulla Terra.
LA MISURAZIONE DOPPLER "A DUE VIE"
Con l'introduzione di un ricevitore-trasmettitore [transponder] a bordo delle sonde spaziali, fu possibile utilizzare la misurazione Doppler "a due vie". Praticamente un segnale veniva trasmesso da un'antenna terrestre verso il ricevitore della navicella. Lì veniva convertito in una nuova frequenza semplicemente moltiplicando la frequenza di ricezione per un rapporto noto. Infine la sonda rinviava il segnale alla Terra tramite il trasmettitore di bordo. A partire dalla frequenza del segnale inviato dalla Terra potevano essere determinate — con grande precisione — sia la risultante informazione Doppler, che i parametri tachimetrici della sonda.
Con i calcoli Doppler a due vie si poteva stabilire la posizione della sonda, con una precisione di 32-80 km (anche da milioni di km dalla Terra). Per la velocità angolare si poteva arrivare ad un'accuratezza di 1,09 km/h. Anche oggi, a causa dello spostamento Doppler e di altri effetti, la frequenza del segnale ricevuto a Terra cambia ampliamente. Così la ‘‘sintonizzazione’’ [tuning] delle stazioni riceventi terrestri deve essere continuamente cambiata. Ma per questo sia la sonda che il ricevitore a terra hanno sistemi elettronici che provvedono ad un controllo automatico sulla frequenza per tenere il ricevitore ‘‘bloccato’’ [locked] in ‘‘sintonia’’ [tune] sulla frequenza di ricezione.
IL PRIMO COMPLESSO DISF
A Goldstone Lake (California) c'erano due stazioni che avevano ciascuna un'antenna parabolica dal diametro di 26,5 metri. Il centro di comando della missione era situato nell'Echo Station (DISF-12). Questa poteva: inviare comandi, ricevere la telemetria, ottenere dati sia sullo spostamento Doppler a due vie che sulla velocità angolare. La potenza del segnale trasmesso da DISF-12 per le missioni Ranger era di 200 W. Come riserva si poteva utilizzare anche un trasmettitore da 50 W. Invece la Pioneer Station (DISF-11) non non poteva né inviare comandi, né ottenere dati dallo spostamento Doppler a due vie, velocità angolare o telemetria. Utilizzando la sua antenna da 26,5 metri la stazione aveva il compito essenziale di ricevere l'immagini televisive, di cui una parte venivano elaborate dall'Echo Station.
IL SECONDO COMPLESSO DISF
A circa 110° di longitudine est da Goldstone, nel Febbraio 1959 fu scelto il sito per il secondo complesso DISF. Il luogo chiamato Woomera era in una regione desertica, 350 km a nord di Adelaide. La firma fra JPL e il governo australiano fu siglata nell'Aprile 1960. L'esercitazione finale del successivo 3 Novembre andò alla perfezione: Goldstone inviò messaggi via voce e ‘‘telescrivente’’ [teletype] facendoli "rimbalzare" sulla Luna; poi la stazione australiana riuscì a riceverli. L'esperimento di collaudo del "rimbalzo lunare" fu ripetuto il 10.02.1961 ed ancora una volta i tecnici australiani dimostrarono la loro bravura. Nel 1963 la denominazione del complesso cambiò da DISF-4 a DISF-41.
IL TERZO COMPLESSO DISF
La necessità di una continua copertura nel ‘‘tracciamento’’ [tracking] delle sonde nello spazio profondo obbligò il JPL ad una richiesta ben precisa. La Nasa doveva costruire una terza stazione DISF; inoltre per rispettare la distanza longitudinale di 120° da Goldstone e Woomera, si poteva scegliere un sito fra Spagna e Sudafrica. La Nasa e il JPL, responsabile per il programma di esplorazione spaziale americano, preferivano il paese europeo; ma per complessi motivi politici fu poi scelto il Sudafrica. Un vantaggio importante era che tutte le sonde interplanetarie lanciate da Cape Canaveral sarebbero passate sopra lo stato sudafricano circa un'ora dopo il lancio. Questo significava che il collegamento sonda → Terra [downlink in gergo] sarebbe avvenuto poco prima dell'inserimento nella traiettoria interplanetaria. Durante questo periodo i controllori di missione, a seconda dei dati telemetrici o di navigazione ricevuti, potevano prendere decisioni importanti per l'esito della missione. Così venne scelta la zona di Hartebeesthoek (48 km a nord di Johannesburg), per la costruzione del terzo complesso, che iniziò a metà Gennaio 1961. Nel 1963 la sua denominazione cambiò da DISF-5 a DISF-51.
|
(1) |
|
Copertura in miglia delle stazioni DISF (dal 24.12.1963 DSN) per le missioni Ranger.
STAZIONI DI SUPPORTO ALLA MISSIONE
Anche per le missioni Ranger vennero utilizzata una MTS [Mobile Tracking Station, ‘‘Stazione Mobile di Inseguimento’’)] Durante la missione di Pioneer-4 nel 1959, questa stazione era posta nell'isola caraibica di Portorico. Poi il JPL decise di smontarla, aggiornarla e posizionarla vicino all'antenna di Hartebeesthoek. Questa stazione (DISF-59) aveva un'antenna inclinabile dal diametro di 3,048 metri. Il suo scopo era quello di ottenere dati sullo spostamento Doppler a due vie e sulla posizione angolare della navicella. Il segnale trasmesso dall'antenna aveva una potenza di 25 W. Infine l'MTS non poteva né inviare comandi e né ricevere la telemetria. Come ulteriore supporto alle missioni interplanetarie, quindi anche lunari, furono usate due stazioni "portatili" (della dimensione di in una valigetta). Il loro scopo era quello di ricevere la telemetria. Questi impianti mobili furono posti nella collina vicino a DISF-51 e nell'aeroporto del Madagascar.
Infine come ulteriore supporto venne usata la stazione di monitoraggio di Cape Canaveral (DISF-0 poi DISF-71). Questa stazione aveva un'antenna dal diametro di 1,83 metri e poteva ricevere sui 960 MHz la telemetria in tempo reale. Inoltre aveva un trasmettitore da 25 W per un ‘‘controllo finale’’ [checkout] della navicella prima del lancio. Infine la stazione era capace di tracciare la navicella dal lancio finché non superava l'orizzonte locale. Tutti i dati telemetrici venivano poi inviati al JPL per via telefonica.
Praticamente i complessi di Woomera e Johannesburg erano quasi uguali all'Echo Station di Goldstone: stessa potenza del segnale trasmesso (200 W però senza trasmettitore di riserva), stesso diametro dell'antenna (26,5 metri), stessa velocità d'inclinazione su entrambi gli assi per la parabola (0,7 gradi/secondo). Infine tutte le stazioni utilizzavano cinque GM (Ground Mode, modalità Terra). Queste modalità di funzionamento erano:
• GM-0 (solo trasmissione, no ricezione);
• GM-1 (spostamento Doppler "ad una via", solo ricezione);
• GM-2 (spostamento Doppler "a due vie" in una stazione, trasmissione/ricezione);
• GM-3 (spostamento Doppler "a due vie", due stazioni in modalità non coerente cioè solo ricezione);
• GM-4 (spostamento Doppler "a due vie", due stazioni in modalità coerente cioè solo ricezione con il segnale di riferimento proveniente dalla stazione trasmittente);
• GM-5 (nessun dato sullo spostamento Doppler, solo ricezione).
SPACE FLIGHT OPERATIONS FACILITY
Nell'Ottobre 1963 nell'edificio 230 del JPL di Pasadena fu inaugurato l'SFOF [Space Flight Operations Facility, ‘‘Costruzione per le Operazioni di Volo Spaziale’’]. Questo centro di controllo decideva quali comandi inviare alle sonde interplanetarie della Nasa. Allora i collegamenti con le stazioni DISF avvenivano tramite telescrivente. Per sicurezza, le informazioni sui comandi erano trasmesse per tre volte alla stazione che doveva poi inviarli. Dopo seguiva una verifica con una chiamata telefonica. L'equipaggiamento di comando e controllo di ogni stazione capace di inviare comandi aveva un'unità RWW [Read-Write-Verify, ‘‘Lettura-Scrittura-Verifica’’]. In questo modo si potevano ripetere i comandi trasmessi e confermarne l'esecuzione. In pratica, il sistema leggeva e verificava il messaggio dalla telescrivente, trasformava il comando in un segnale per la radio trasmissione e monitorava il segnale trasmesso bit per bit. Se qualche valore digitale si rilevava non corretto, la trasmissione veniva automaticamente fermata.
In ogni stazione DISF l'equipaggiamento di tracciamento e trattamento dati registrava i parametri più importanti della sonda: la posizione dell'antenna principale, le misurazioni Doppler, la distanza e il riferimento temporale. Queste informazioni venivano poi inviate al SFOF via telescrivente. Invece la telemetria e i dati scientifici erano registrati su nastro magnetico, a disposizione anche del centro della Nasa responsabile del progetto. Di solito i dati digitali venivano visualizzati su schermi speciali. Invece i segnali analogici erano registrati da oscillografi che producevano una forma visibile dei segnali elettrici. Se la quantità dei dati [data] era notevole, allora venivano memorizzati nei calcolatori delle stazioni DISF; poi erano trasmessi al SFOF con le linee ad alta velocità.
Il 24 Dicembre 1963 William Pickering, direttore del JPL, annunciò la costituzione del DSN [Deep Space Network, ‘‘Rete per Spazio Profondo’’]. Quindi le stazioni DISF allora esistenti — Goldstone, Johannesburg, Woomera — diventarono elementi del DSN: Woomera assunse la denominazione di DSS-41 (Deep Space Station). L'antenna e l'MTS di Johannesburg diventarono rispettivamente DSS-51 e DSS-59. Anche la Pioneer e Echo Station vennero rispettivamente denominate DSS-11 e DSS-12. Infine l'Atlantic Missile Range Station di Cape Canaveral fu rinominata sia DSS-71 che “Spacecraft Monitoring Station”.
LE COMUNICAZIONI FRA LE STAZIONI DSN E L'SFOF
Il complesso di Goldstone usufruiva di due circuiti ad alta velocità per la trasmissione dei dati digitali al SFOF (distante circa 160 km in linea d'aria). Le telescriventi potevano trasmettere alle velocità di 60 e 1000 word da 30 bit al minuto. Invece sulle linee ad alta velocità i calcolatori di Goldstone potevano "parlare" con quelli di Pasadena alle velocità di 600, 1200, 4400 bit al secondo (rispettivamente 1200, 2400, 8800 word al minuto). Il centro di comando del complesso di Goldstone era situato nell'Echo Station. I complessi di Woomera e Johannesburg comunicavano fra loro, con Goldstone e l'SFOF usando telefoni e telescriventi organizzati nel DSN Ground Communication System. In particolare, la trasmissione dei dati digitali con l'SFOF avveniva grazie ad una telescrivente ad alta velocità che utilizzava un cavo cablato.
Woomera e Johannesburg poteva "dialogare" con l'SFOF alla velocità di 600, 1200, 4400 bit al secondo (rispettivamente 1200, 2400, 8800 word al minuto). Invece le altre telescriventi trasmettevano alla velocità di 60 word al minuto. Ricapitolando, questi due complessi (anche quella australiano di Tidbinbilla, che poi affiancherà e supererà Woomera) avevano: tre circuiti a telescriventi full-duplex, un circuito per la trasmissione dati ad alta velocità e due circuiti a voce.
LE PRIME DUE MISSIONI RANGER
Le due sonde della prima serie (la “Block I”) dovevano servire a valutare da un punto di vista ingegneristico sia la stabilizzazione d'assetto su tre assi, che la tecnica dell'orbita di parcheggio.
1961 ▪ Il 25 Luglio un razzo Atlas–Agena B con Ranger-1 (prima sonda “Block I” dotata di nove strumenti scientifici e di una telecamera per studi sul nostro pianeta) venne posizionato su una rampa di Cape Canaveral. Il lancio era programmato per il 28 Luglio, la "finestra" sarebbe durata fino al 2 Agosto per 44’ giornalieri (09:53-10:37). Ma alcuni disguidi al sistema di guida del vettore e al calcolatore imposero lo slittamento del lancio. Alle 10:02 del 29, 28’ prima del decollo, ci fu un blackout in tutta la base spaziale ed così fu tutto rimandato al giorno seguente. Il 30 Luglio il conto alla rovescia non partì nemmeno: infatti venne scoperta una perdita nel sistema di controllo dell'assetto della navicella. Dopo una veloce riparazione, la sonda fu rimessa nel vettore. Il 31 Luglio la procedura di decollo venne bloccata per un guasto alla valvola nel serbatoio dell'ossigeno liquido. Il 1° Agosto, poco prima dell'inizio della procedura di decollo, i controllori di volo accesero la strumentazione della sonda. Chissà come un malfunzionamento elettrico azionò le procedure memorizzate nel computer, che "sentenziò" di essere già nello spazio. Così il calcolatore accese la strumentazione ed ordinò il dispiegamento dei pannelli solari anche se la sonda era ancora dentro la carenatura del vettore! Fu necessario togliere la navicella dal razzo, smontarla e controllarla componente per componente.
Finalmente, alle 10:04 del 23 Agosto, Ranger-1 poté decollare alla testa di un Atlas–Agena B. Alle 11:23 la sonda con l'ultimo stadio si collocò in un'orbita di parcheggio terrestre (173,7 x 279,9 km; 90,64’; 32,9°). Alle 11:34, quando venne comandata l'accensione di 90’’ dello stadio Agena ci fu un problema. Una valvola all'interno dello stadio non si aprì, così il motore bruciò solo per pochi secondi. Invece dell'orbita geocentrica di studio, si ottenne un'orbita terrestre molto bassa (169,4 x 502,8 km). Comunque i tecnici del JPL provarono a gestire questa situazione anomala. Cercarono così di ricavare qualcosa d'utile: la sonda dispiegò i pannelli solari, si orientò verso il Sole, puntò l'HGA verso la Terra. Ma l'alternarsi veloce — ogni ora e mezzo circa — di albe e tramonti (tipico di un'orbita così bassa) fece consumare in un solo giorno l'1,1 kg di azoto compresso a disposizione. Senza questi non fu più possibile orientare i pannelli solari. Così il 27 Agosto la batteria di bordo s'esaurì e quindi il contatto con la navicella si perse. Dopo 111 orbite, alle 08:24 circa del 30 Agosto, Ranger-1 rientrò nell'atmosfera (all'altezza del Golfo del Messico) disintegrandosi.
La Nasa in previsione del lancio di
Ranger-2 (programmato fra il 20 e il 28 Ottobre successivi) attuò tutte le procedure per evitare ritardi nel lancio e sopratutto il fallimento della missione. Anche nel caso di Ranger-2, la finestra di lancio sarebbe durata 44’ (09:53-10:37) giornalieri. Il 20 Ottobre, due ore prima del decollo, venne rilevata un'anomalia ad uno strumento scientifico della navicella. I controllori di volo — dopo aver discusso fra loro — decisero che il conto alla rovescia poteva riprendere. Ma 40’ prima del decollo il sistema elettrico dell'autopilota sul razzo si guastò per cause ignote. Così il lancio venne rimandato al 22; ulteriori disguidi fecero slittare la data al 24. Quel giorno, tanto per cambiare, fu rilevata una perdita nel sistema idraulico del vettore Atlas–Agena B. Il lancio fu posticipato a metà Novembre per la complessità delle necessarie riparazioni. Finalmente, alle 08:12 del 18 Novembre, Ranger-2 decollò sospinto dal solito Atlas–Agena B. Anche questa volta lo stadio Agena non si accese correttamente; la sonda rimase in un'orbita terrestre ancora più bassa (152,7 x 234,4 km; 88,28’; 33,34°). Il veicolo spaziale oltretutto andò in avaria già alla seconda orbita. Il 20 dopo aver percorso diciannove orbite Ranger-2 rientrò nell'atmosfera disintegrandosi.
LE NAVICELLE “BLOCK II”
Le tre successive sonde sarebbero state del tipo “Block II”, cioè dotate di: telecamera, magnetometro, spettrometro a raggi gamma, altimetro radar e capsula strumentale. Il piano della missione era complesso e ambizioso: inserimento in orbita terrestre di parcheggio, seconda accensione dello stadio Agena per imboccare la traiettoria verso la Luna, separazione dallo stadio di fuga, dispiegamento/orientamento dell'LGA e dei pannelli solari, manovra di correzione della traiettoria, manovra per orientare la telecamera e conseguente ricognizione fotografica. Poi la sonda avrebbe sganciato, dai 300 metri di quota e alla velocità di 200 km/h, una piccola capsula munita di un trasmettitore funzionante per 30 giorni. Infine la sonda si sarebbe schiantata sulla superficie selenica.
1962 ▪ Alle 20:30 del 26 Gennaio, partì Ranger-3 sospinto da un razzo Atlas–Agena B. Il lancio ed il parcheggio nell'orbita di stazionamento andarono bene. Purtroppo, al momento dell'accensione dello stadio di fuga, un errore del sistema di guida (forse causato da un transistor guasto) fece imprimere troppa velocità, stimata in 160 m/s. La Luna sarebbe stata mancata di circa 32.000 km, una distanza troppo elevata per essere "recuperata" dal propulsore di bordo da 230 N. Comunque fu tentata ugualmente la manovra di correzione. La speranza era di portare il veicolo spaziale più vicino possibile alla Luna in modo da riprendere qualche foto. La correzione venne attuata al momento previsto (le 11:23 circa del 27); ma risultò applicata in direzione opposta! Infatti un segno nella sequenza di tre comandi — che attuavano la manovra — era stato invertito! Questa fatale inversione di segno avvenne fra il computer del JPL che inviava i comandi ded il calcolatore a bordo del Ranger-3. Alle 23:46 del 28 la navicella transitò a 36.793 km dalla Luna. Alle 03:23 del 29, alla distanza di 49.879 km dal nostro satellite, i tecnici comandarono l'accensione della telecamera. Però l'allineamento fra l'HGA e la Terra si perse, bloccando per di più il computer. Vennero ricevute solo poche foto disturbate dove si vedeva solo la "griglia" della telecamera sul nero dello spazio. Ranger-3 proseguì e s'inserì in un'orbita solare di 0,98 x 1,16 UA con un periodo di 406 giorni ed un'inclinazione di 0,4°. Gli intermittenti contatti con il veicolo spaziale, ormai senza controllo e fuori uso, terminarono il 31 Gennaio.
Alle 20:50 del 23 Aprile, Ranger-4 decollò sospinto dal solito Atlas–Agena B. Però alle 21:13, quando si stabilì il contatto con la sonda, ci fu una spiacevole sorpresa: il transponder stava trasmettendo sulla corretta frequenza, ma non c'era alcuna traccia di telemetria! Probabilmente un guasto all'alimentazione del CC&S aveva bloccato l'"orologio di bordo" (il master clock). Così i sottosistemi e le loro l'attività — sia memorizzate che attivabili dietro comando — rimasero inesorabilmente bloccate. La navicella fu comunque seguita attraverso i segnali emessi dal trasmettitore da 50 mW posto nel minilander. Nemmeno a farlo apposta, il lancio era stato così perfetto che la sonda avrebbe impattato la Luna anche senza la manovra di aggiustamento della traiettoria. Alle 12:47:50 del 26 il veicolo spaziale scomparve dietro la Luna. Circa due minuti dopo (12:49:53), Ranger-4 si schiantò alla velocità di 9.600 km/h sulla faccia nascosta alle coordinate 15°30’ sud e 130°42’ ovest.
|
(2) |
|
|
Il luogo, sulla faccia nascosta della Luna, dove si schiantò Ranger-4.
Restava quindi l'ultima sonda della serie “Block II”. Tanto per cambiare, il 16 Ottobre i controllori di volo bloccarono il conto alla rovescia a soli 50’ dal lancio. I motivi furono molteplici: un guasto al computer ed un cortocircuito nel transponder di bordo. La sonda fu distaccata dal razzo e portata in un hangar. Il pezzo difettoso fu subito sostituito in previsione del lancio per il 17. Ma dato che l'uragano Ella imperversava sui Caraibi, si preferì rimandare al giorno successivo. Alle 16:59 del 18, Ranger-5 decollò sospinto dal solito razzo Atlas–Agena B. Il lancio, l'inserimento in orbita di parcheggio terrestre, l'imbocco della traiettoria verso la Luna andarono come previsto. Alle 17:59 iniziarono le attività nominali; alle 18:12 i tecnici del JPL comandarono l'estensione dei pannelli solari. Dopo solo due minuti si sviluppò un cortocircuito che mise fuori uso il sistema d'alimentazione principale (pannelli solari e batterie di bordo). Comunque c'era sempre una piccola batteria di riserva, ma il computer per un mancato comando fece saltare mezza strumentazione disturbando anche i collegamenti e l'invio della telemetria. Inoltre alle 02:45 del 19 si presentò un'anomalia al sistema di stabilizzazione. Infine, alle 04:00 circa, la batteria di riserva s'esaurì durante i preparativi della manovra di correzione della traiettoria. Il contatto diretto con la navicella si perse, così lo spettrometro a raggi gamma — unico strumento funzionante ma sempre retratto nel suo alloggiamento — smise di fornire dati. L'unico contatto indiretto rimase quello con il trasmettitore del mini-lander. Nonostante tutto, alle 15:53 del 21, Ranger-5 sfiorò la Luna, alle Ottobre passando a soli 723 km dalla sua superficie. Comunque fu possibile ricavare una prima misura sulla massa lunare grazie allo spostamento Doppler dei segnali radio trasmessi. La sonda fu "seguita" fino al 30 ad una distanza di 1.271.381 km. Poi proseguì nella sua orbita eliocentrica (0,95 x 1,06 UA, 369 giorni, 0,43°).
Visti i fallimenti, venne aperta un'inchiesta sui fallimenti delle sonde del tipo “Block II”. Risultò che questi veicoli spaziali avevano pochi sistemi duplicati. Per di più la procedura di sterilizzazione (24 ore in un'atmosfera di ossido di etilene a 125 °C) poteva danneggiare o rendere fragili le guaine dei fili elettrici.
LE NAVICELLE “BLOCK III”
La Nasa già a metà 1961 aveva avviato la definizione della missione “Block III”. L'obiettivo era ottenere fotografie ad alta risoluzione della superficie lunare. Queste immagini sarebbero state importanti sia per il programma di atterraggio lunare con equipaggio (Apollo) che per il programma scientifico spaziale (le sonde Mariner). La nuova serie divenne una diretta estensione della fallimentare “Block II”; ci sarebbe stata un'unica variazione del "carico": basta minilander. Comunque furono apportati delle importanti innovazioni: pannelli solari rettangolari e indipendenti, più ridondanza nei sistemi di bordo e nessuna procedura di sterilizzazione. La nuova missione fu rivista nel Dicembre 1962. Praticamente l'unico obiettivo, meno grandioso e più pratico, fu quello di riprendere moltissime immagini da varie telecamere durante l'inesorabile caduta verso il suolo lunare, arrivando fino alla ripresa della superficie con una risoluzione di qualche metro.
1964 ▪ Alle 15:49:09 del 30 Gennaio, decollò Ranger-6 (prima sonda “Block III”) con un razzo Atlas–Agena B. Il lancio fu quasi perfetto, eccetto il fatto che la telemetria segnalò l'accensione delle telecamere per 67’’ dalle 15:51:29 (2’ e 20’’ dopo il decollo). Naturalmente nel lancio venne accumulato un errore di traiettoria che avrebbe fatto mancare la Luna di 797 km. Così il 31 Gennaio fu attuata una manovra (durata: 67’’; ∆v = 5,81 m/s) da parte del propulsore di bordo. L'impatto nel grande Mare della Tranquillità era assicurato. Alle 09:09 del 2 Febbraio, alla distanza di 2076 km dalla Luna (che si avvicinava a 2,5 km/s cioè 7193 km/h), vennero attivate le telecamere; ma... arrivò solo statica (cioè la "griglia" e basta!). Furono attuate tutte le procedure ed i comandi di emergenza, ma non servì a nulla. Alle 09:24:32 Ranger-6 si schiantò alla velocità di 9568 km/h ai 9,39° sud e 21,51° est lunari senza aver trasmesso nemmeno un'immagine!
Fu un grave colpo per la Nasa, reso ancora più duro per aver fallito miseramente sul più bello (addirittura in diretta televisiva nazionale). Il lancio di Ranger-7 venne così sospeso in attesa dell'indagine interna. Dall'analisi della telemetria durante il lancio, si scoprì che un segnale elettrico aveva acceso le telecamere 0,5’’ dopo la separazione dei sovralimentatori (booster) dello stadio Atlas. L'unico sistema d'alimentazione delle due catene di telecamere era andato in corto perché il razzo si trovava ancora negli strati bassi (e densi) dell'atmosfera. Probabilmente i gas caldi o le scintille (che si scaturirono dalla separazione dei booster) avevano generato il segnale elettrico fatale. Il rapporto dell'inchiesta, rilasciato il 17 Marzo, concluse che era altamente sconsigliabile avere un circuito di alimentazione unico per tutte le telecamere. Infatti se non veniva ottenuta la ricognizione fotografica ad alta risoluzione, sarebbe fallito il solo vero obiettivo della missione. Fra le varie modifiche apportate, la temperatura media all'interno della "torre" fu ridotta a 11 °C.
|
(3) |
|
|
Una copia del Ranger-7 esposta nella galleria “Milestones of flight” del National Air and Space Museum.
COSTRIZIONI PER LA MISSIONE
a) Il luogo d'impatto doveva avere all'arrivo delle condizioni di luminosità adatte. I migliori risultati si sarebbero avuti per un angolo luce solare–superficie lunare di 50-80 gradi;
b) era preferibile allunare non lontano dall'Equatore per compatibilità con il programma Apollo;
c) se non fosse stato possibile impattare sulla zona prevista, allora era consigliabile sfruttare al massimo una ricognizione fotografica di porzioni inedite della Luna. In questo caso si sarebbe optato per un fly-by dal lato ovest.
|
(4) |
|
|
Le costrizioni da rispettare per imboccare la giusta traiettoria verso la Luna. NB: mi.= miglia; mph = miglia/ora.
COSTRIZIONI PER LA NAVICELLA E IL SUO ASSETTO
a) La dimensione della manovra correttiva non poteva superare il limite massimo disponibile;
b) l'angolo Terra–sonda–"limbo lunare" non doveva scendere sotto i 15°, altrimenti si sarebbe "persa" la Terra;
c) era consigliabile regolare il tempo di volo in modo appropriato. In particolare, il timer di bordo doveva attivarsi non prima di 45’ e ne dopo 5’ all'impatto sulla superficie lunare;
d) l'angolo dell'asse di rotazione della sonda, rispetto alla linea sonda-Terra, non doveva essere inferiore a 40° durante la manovra di correzione della traiettoria. Se questo non fosse successo c'era il rischio di perdere il collegamento con la sonda durante questa fase critica della missione;
e) era consigliabile che la manovra di correzione e le fasi finali della missione cadessero durante la copertura da parte del complesso di Goldstone;
f) nella sequenza terminale della manovra di correzione la rotazione di ‘‘beccheggio’’ [pitch] non doveva essere minore di -47° e non superiore a +55° rispetto all'asse di rotazione.
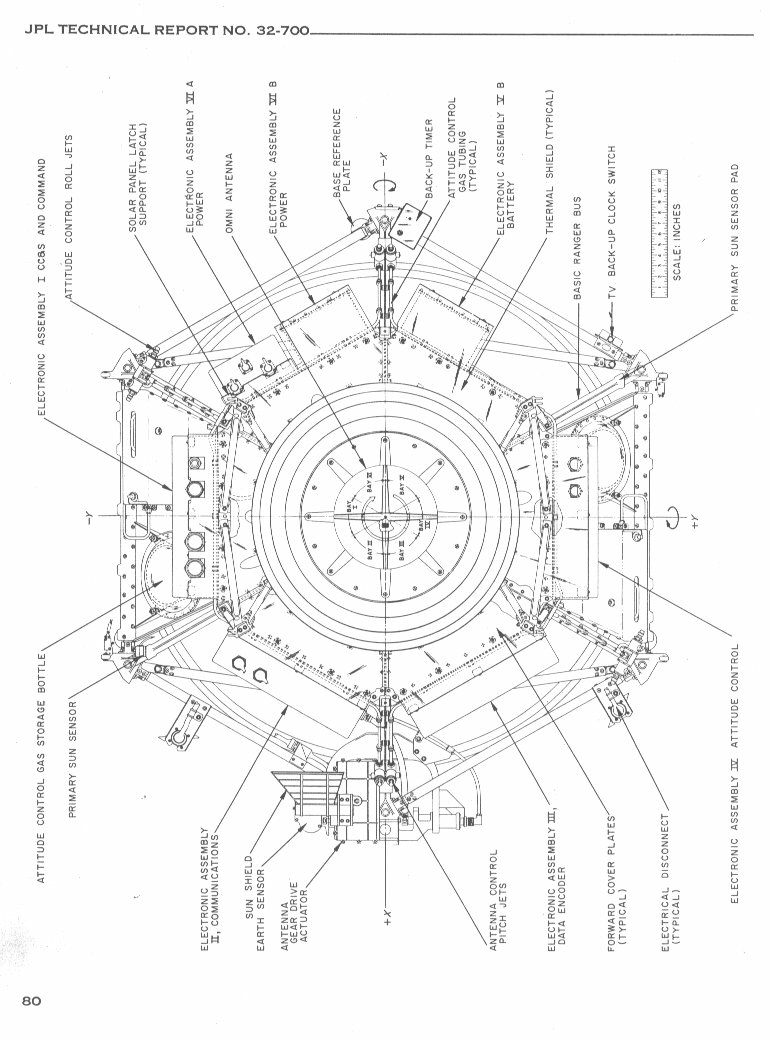
DESCRIZIONE DELLA SONDA
Aveva una struttura esagonale in alluminio (diametro: 150,4 cm; peso: 41,34 kg). Al centro della base inferiore era posto il propulsore per eseguire l'unica manovra di correzione prevista. Dentro il corpo esagonale erano disposti, nella breve profondità fra il propulsore e le pareti esterne, sette moduli elettronici [assembly in gergo]. In ordine erano: CC&S e sistema di comando (modulo 1
▪ peso: 4,36 kg); telecomunicazioni (mod. 2 ▪ 17,56 kg); codificatore dati (mod. 3 ▪ 9,12 kg); sistema di controllo dell'assetto ed autopilota (mod. 4 ▪ 26,78 kg); batterie di bordo (mod. 5); sistema energetico (moduli 6A e 6B). Fissato sulla base superiore del prisma, c'era un cono troncato alto 152,4 cm. Il suo diametro alla base era di 68,5 cm; mentre alla cima si riduceva a 40,6 cm. L'altezza della navicella era di 3,6 metri; mentre l'apertura "alare" (da pannello a pannello) arrivava a 457,2 cm.
|
(5) |
|
|
|
(6) |
Fino a cinque minuti prima del lancio, una corrente continua [DC, Direct Current] alla tensione di 25,5 V fluiva dal vettore verso la sonda. Quest'energia elettrica teneva cariche due batterie interne all'argento-zinco, ciascuna dalla capacità di 42 Ah e dalla potenza di 1 kWh. Nel rispetto del principio di ridondanza, una batteria rimaneva di riserva. Ognuna di queste poteva fornire per nove ore una corrente continua alla tensione di 26,5 V. Era un'energia elettrica sufficiente sia per la fase iniziale, che per la manovra di correzione della traiettoria, che per la fase finale.
Finché i due pannelli solari non erano in grado di funzionare era necessario attingere alle batterie. Secondi i calcoli, nella missione nominale sarebbe stata utilizzata non più del 20% della capacità elettrica stipata nelle batterie. Ognuno dei pannelli (indicati come + x o - x rispettivamente se a destra o sinistra della "torre") aveva 4896 celle al silicio e misurava: 73,9 x 153,7 cm. Questo dispositivo di produzione energetica era diviso in tre segmenti elettricamente isolati. In questo modo, un cortocircuito ad un segmento avrebbe lasciato il resto del pannello funzionante. Inoltre un'avaria ad un pannello non avrebbe portato conseguenza all'altro. La superficie utile dei pannelli era di 2,27 m² e la conseguente produzione energetica era di 200 W (la metà per ogni pannello). L'acquisizione del Sole, cioè il dispiegamento dei pannelli e il loro corretto funzionamento, sarebbero automaticamente avvenuti 60 ± 2 minuti dopo la separazione. Infatti nel malaugurato caso di una mancanza del comando da parte del CC&S, avrebbe provveduto un ‘‘temporizzatore’’ [timer] idraulico.
|
(7) |
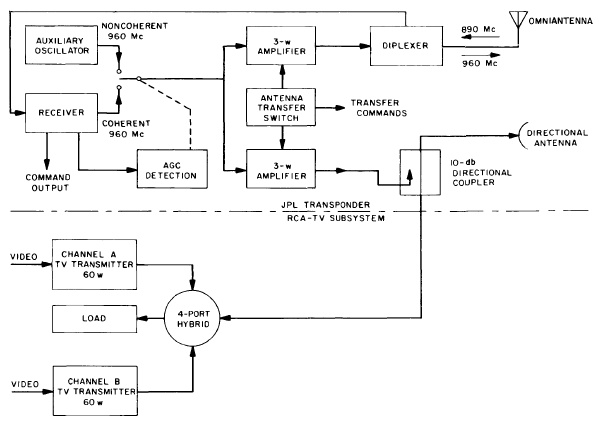 |
Diagramma a blocchi del sistema per le telecomunicazioni.
Il sistema per le telecomunicazioni era composto da: un'antenna omnidirezionale a basso guadagno (LGA) posta alla sommità della "torre", un'antenna parabolica ad alto guadagno (HGA) dal diametro di 1,2 m fissata su un lato del corpo esagonale, due trasmettitori per le immagini ed un transponder per la telemetria. Quest'ultimo sistema si componeva di un ricevitore a ‘‘tracciamento automatico di fase‘‘ [automatic tracking phase] sui 890 MHz ed un trasmettitore sui 960,05 MHz. L'uscita da 250 mW del transponder era portata a 3 W grazie a due amplificatori in radiofrequenza. Uno di questi era ‘‘accoppiato’’ [coupled] all'LGA con un diplexer. L'altro amplificatore RF era "associato" all'HGA grazie ad un ‘‘accoppiatore’’ [coupler] che combinava i due segnali video. L'uscita da ciascun amplificatore era inviata alla rispettiva antenna ‘‘commutando‘‘ [switching] un circuito a filamento. L'uscita irradiata aveva una potenza di 3 W sull'LGA e 0,3 W sull'HGA. Le modalità del sistema telemetrico erano definite secondo precisi periodi all'interno della missione.
|
Modalità |
Periodo della missione |
Durata approssimativa |
|
“dal lancio all'inizio della manovra di "metà corsa"” “la manovra propulsiva di metà corsa” “dalla riacquisizione del Sole alla fine della manovra terminale” “la caduta verso la superficie lunare e ricognizione fotografica” |
16 ore 7-17 minuti 48 ore 26-33 minuti |
Al sottosistema telemetrico era riservato una banda ampia 0,16 MHz (160 kHz) centrata rispetto alla frequenza di downlink sui 960,05 MHz. Per la telemetria venivano usati due processori (uno a 15 punti per la "catena"-F e uno a 90 punti per la "catena"-P). Il sistema telemetrico a 15 punti campionava valore analogici al ritmo di 1 punto/secondo. Nella "modalità di viaggio" l'uscita di questo ‘‘commutatore’’ [switch] passava per un canale specifico, denominato “channel 8”. Questo particolare dispositivo era controllato da un VCO [Voltage-Controlled Oscillator, ‘‘Oscillatore Controllato in Tensione’’] che aveva una frequenza centrale pari al 1/48 del segnale trasmesso). Durante la "modalità terminale" veniva attivato il ‘‘campionamento’’ [sampling] a 90 punti, che forniva un'ampia varietà di misurazioni ingegneristiche sulle telecamere P. Il ritmo di raccolta delle misurazioni era di tre punti/secondo. In totale il sottosistema telemetrico "riforniva" dieci canali con 110 misurazioni diverse. Quindi c'erano cinque misurazioni sullo stato e le prestazioni di altri sottosistemi: la pressione e temperatura nei serbatoi dell'azoto compresso, la posizione dell'HGA, la temperatura nei moduli 5 e 6.
L'antenna omnidirezionale (LGA) riceveva i segnali trasmessi dalla Terra oppure trasmetteva la telemetria quando l'HGA non era orientata verso le stazioni d'ascolto terrestri. L'antenna da alto guadagno trasmetteva sia i segnali telemetrici che l'immagini riprese. Il controllo termico veniva attuato grazie a tecniche passive che implicavano l'uso di particolari vernici superficiali, ma anche grazie ad uno scambiatore di calore interno. Le temperature nei vari compartimenti dalla sonda dipendevano da: l'irraggiamento solare, la radiazione energetica dallo spazio, il calore conseguente alla dissipazione d'energia dei sottosistemi interni e altri fattori minori. Naturalmente dalla telemetria inviata si poteva controllare la temperatura interna. In particolare, nei moduli 5 (batterie di bordo) e 6 (sistema energetico) le temperature dovevano essere rispettivamente comprese fra: 24,4-31,1 °C e 26,6-33,3 °C. In ogni caso le batterie avevano un preciso intervallo termico di funzionamento: da 10 a 54,4 °C.
(8)
Uno schema tecnico della navicella vista dall'alto.
Il sistema propulsivo, da usarsi per l'unica manovra di correzione era un ‘‘motore a razzo’’ [rocket engine] pesante 10,4 kg che utilizzava come propellente 11,3 kg d'idrazina. Naturalmente per avviare la combustione era usato un ossidante. La reazione chimica veniva mantenuta da palline in ossido d'alluminio, che fungeva da catalizzatore. Il propulsore era capace di fornire per massimo 98,5’’ una spinta di 224 N. Un singolo impulso propulsivo durava 50 ms. La variazione di velocità (Δv) apportabile andava da un minimo di 10 cm/s ad un massimo di 60 m/s.
Il calcolatore di bordo faceva in modo che il propulsore di bordo si spegnesse al momento fissato. Il valore del Δv era misurato con un accelerometro lineare in combinazione con un integratore. Dato che un computer già stava nell'unità CC&S ed il valore dell'incremento tachimetrico era trasmesso digitalmente da Terra, serviva proprio un sottosistema accelerometro. Questo dispositivo in pratica emetteva degli impulsi, la cui frequenza era direttamente proporzionale all'accelerazione applicata. Ogni impulso prodotto rappresentava un valore costante di un incremento/decremento di velocità (a seconda della direzione dell'accelerazione). Questo valore, detto fattore scalare, era di 3,048 cm/s² per impulso. In pratica il sistema usava una frequenza precisa (dal clock del CC&S) per controllare l'ampiezza dell'impulso. Invece una data tensione (8,4 V) — controllata da un diodo di precisione Zener — determinava l'altezza dell'impulso. Il calcolatore, avendo una precisa misura della velocità, poteva far ottenere al propulsore il Δv richiesto. Durante la manovra propulsiva, solo un sistema autopilota controllava l'assetto della navicella. Come riferimenti, venivano considerati due tipi di segnali:
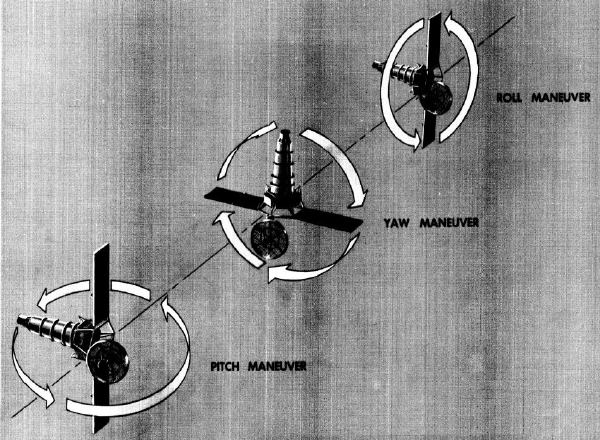
- quelli provenienti dai tre giroscopi di bordo (uno per movimento: yaw, pitch, roll);
- quelli come reazione di ritorno (feedback) nei quattro vani di scarico (jet vane) del propulsore.
|
(9) |
 |
L'autopilota così poteva aggiustare le posizioni angolari di quattro alette, una per ogni vano di scarico. Prima dell'accensione l'alette era in una posizione neutra. Ognuna di queste era attaccata ad un attuatore, un dispositivo senza ingranaggi che richiedeva una corrente da 60 mA in continua a 12 V. Uno di questi dispositivi forniva un forza di torsione pari a 14,12 milliN·m. I quattro attuatori erano montati in un anello posto intorno al piano di scarico del propulsore. La loro funzione era duplice: tenere i vani allineati al flusso di scarico da 222 N; deviare i suoi gas per applicare delle torsioni alla navicella (funzione da autopilota).
|
(10) |
 |
L'anello con gli attuatori posti nei vani di scarico,
In pratica il flusso di scarico veniva deflesso, nei quattro vani indipendenti, dal vettore di spinta. Naturalmente gli attuatori avrebbero funzionato solo durante la manovra propulsiva. Nel vano del getto di scarico la paletta poteva ruotare di ± 25° tra due valori limite. Un ‘‘doppio’’ [dual] potenziometro a risoluzione infinita "leggeva" le posizioni angolari della palette; così i loro valori erano teletrasmessi a Terra. I quatto attuatori (226,8 grammi ciascuno), le palette e l'anello di montaggio pesavano 1,59 kg. Il sistema autopilota aveva un consumo massimo di 20 W.
Il CC&S [Central Computer and Sequencer, ‘‘Calcolatore Centrale ed Ordinatore’’] poteva eseguire nove RTC [Real-Time Command]. Per la precisione, questi erano:
• RTC-0: ‘‘pulizia del sistema di comando’’ [clear spacecraft comand system], serviva per preparare il CC&S;
• RTC-1: ‘‘imporre la rotazione e/o accendere il sensore terrestre’’ [roll override/Earth sensor power on);
• RTC-2: ‘‘imporre al circuito "a cerniera" dell'HGA uno degli otto angoli’’ pre-regolati [antenna hinge angle override];
• RTC-3: ‘‘commutare le telecomunicazioni da un'antenna ad un'altra’’ [antenna switchover], cioè da LGA → HGA o HGA → LGA;
• RTC-4: ‘‘iniziare la sequenza della manovra di metà corsa’’ [initiate midcourse maneuver sequence];
• RTC-5: “spegnimento forzato delle "catene" F e P entro 67,75 ore dalla separazione fra lo stadio Agena e la sonda”;
• RTC-6: ‘‘iniziare la sequenza della manovra terminale’’ [initiate terminal maneuver sequence];
• RTC-7: “accensione forzata di tutto il sistema video a 12 minuti dall'impatto”;
• RTC-8: ‘‘ignorare una manovra’’ [override maneuve], sia di metà corsa o terminale.
Il sistema di comando era composta da un blocco d'indirizzamento a 5 bit ed un blocco dati a 12 bit. In questi circuiti elettronici erano implementati i nove RTC. Comunque era possibile memorizzare fino ad un massimo di sei comandi speciali, detti SC [Stored Command]. Queste istruzioni inviate da terra riguardavano unicamente le due manovre, di "metà corsa" e "terminale") In particolare, erano così definiti:
• SC-1: ‘‘durata del rollio per la manovra di metà corsa’’ [midcourse maneuver roll duration];
• SC-2: ‘‘durata del beccheggio per la manovra di metà corsa’’ [midcourse maneuver pitch duration];
• SC-3: ‘‘durata dell'imbardata per la manovra di metà corsa’’ [midcourse maneuver yaw duration];
• SC-4: ‘‘durata del primo beccheggio per la manovra terminale’’ [terminal maneuver first pitch duration];
• SC-5: ‘‘durata dell'imbardata per la manovra terminale’’ [terminal maneuver yaw duration];
• SC-6: ‘‘durata del secondo beccheggio per la manovra terminale’’ [terminal maneuver second pitch duration].
L'ordinatore poteva memorizzare sia i comandi inseriti prima del lancio che quelli inviati successivamente. Un sistema di ‘‘sincronizzazione’’ [timing in gergo] controllava la loro esecuzione. Il sistema di comando decodificava la sotto-portante del segnale ricevuto, così poteva individuare i RTC e/o SC. Inoltre il CC&S contava ore, minuti e secondi trascorsi da quando veniva attivato (alla separazione della sonda dallo stadio finale).
(11)
sottosistemi di guida e controllo dell'assetto permettevano l'"acquisizione" del Sole e della Terra grazie ai quattro sensori solari e al sensore terrestre. Successivamente questi dispositivi ottici avrebbero ‘‘bloccato’’ [lock in gergo] i due corpi celesti. La stabilizzazione era mantenuta rispetto a due assi "mobili": z* (pannello solare–pannello solare) e y* (sensore terrestre–HGA–Terra); in più c'era anche un asse "fisso" x*.
Gli assi, reciprocamente ortogonali fra loro, formavano un sistema di riferimento tridimensionale; quindi i movimenti possibili erano tre:
- ‘‘rollio’’ [roll] rispetto all'asse x*, una rotazione in senso antiorario (di angolo φ)sul piano orizzontale.
- ‘‘beccheggio’’ [pitch] rispetto all'asse y
*, cioè una rotazione in senso antiorario (di angolo θ) sul piano orizzontale;- ‘‘imbardata’’ [yaw] rispetto all'asse z
*, una rotazione in senso orario (di angolo Ψ) sul piano verticale;¦
*¦ le lettere x, y, x — a differenza dei disegni tecnici — si rifanno alle definizioni di rollio, beccheggio e imbardata secondo Wikipedia.
|
(12) |
 |
L'asse x manteneva i pannelli solari rivolti verso il Sole. I sensori solari fornivano ai circuiti logici del sistema di controllo dell'assetto i segnali ("uno" o "zero") sugli eventuali errori per gli altri due assi. Così gli ugelli a gas si sarebbero azionati per annullare tali errori. L'antenna direzionale, cioè quella ad alto guadagno, era rivolta verso la Terra grazie alla combinazione dell'asse y e un quarto asse — praticamente un beccheggio ridondante — chiamato ‘‘perno’’ [hinge].
Il sistema di controllo dell'assetto richiedeva informazioni sia sulla posizione che la velocità angolare rispetto ai tre assi. Questo tipo di informazione proveniva unicamente dall'uso di tre giroscopi “Honeywell GG49-E19”. I dispositivi erano riempiti con un fluido ad alta densità e bassa viscosità; così si poteva fare a meno dei radiatori (che avrebbero assorbito molta energia elettrica). Il sottosistema dei giroscopi aveva tre modalità di funzionamento: una per l'acquisizione/riacquisizione del Sole e della Terra; una per il viaggio; una per la manovra propulsiva di metà corsa. Normalmente la velocità di rotazione era di 720° l'ora: cioè due giri ogni 60’. Questa si generava per il prodotto fra una corrente (valore nominale: 50 mA) ed una corrente di controllo (7,2 mA). Il sottosistema giroscopico era calibrato e compensato solo per un preciso intervallo termico: 29,4-54,4 °C. Perciò venne introdotto un circuito di compensazione della temperatura nel regolatore della corrente di controllo. Un trasduttore di temperatura era attaccato all'involucro (package) del giroscopio ed era usato per teletrasmettere l'effettiva temperatura in volo. Il sottosistema giroscopico era costituito da: il package, 12 condensatori integratori bi-polari al
tantalio, alcuni relè, un condensatore a circuito d'iterazione, modulo dell'elettronica (tre amplificatori di ri-bilanciamento per i giroscopi), regolatori delle due correnti e altri relè specifici.L'attuazione delle tre spinte ortogonali (rollio, imbardata, beccheggio) era data da un
sottosistema di ugelli a gas compresso. In pratica sei ugelli spruzzavano getti d'azoto, convogliato da due bombole in titanio. Ciascuna di queste ne conteneva 959,348 grammi alla pressione di 248,37 atmosfere. Nel rispetto del principio di ridondanza il sottosistema era suddiviso in due identici semi-sistemi a sé stanti. Ciascuno di questi aveva la sua riserva di gas, un regolatore e sei ugelli (due per ogni movimento — rollio, beccheggio, imbardata). Quindi la sonda si poteva muovere in entrambe le direzioni, oraria/antioraria, sui tre assi.La minima accelerazione di cui era capaci questi sottosistemi era di 0,24 mrad/s² [microradianti al secondo quadrato]; così le torsioni non avrebbero "saturato" i giroscopi. Inoltre se una valvola rimaneva accidentalmente aperta non sarebbe fallita la missione: infatti i trasduttori di pressione, posti prima del regolatore, e quelli di temperatura, posizionati sui serbatoi, servivano a fornire rispettivamente valori di pressione e temperatura. Un regolatore pneumatico riduceva la pressione del gas a 1,02 ± 0,08 atmosfere per la distribuzione alle valvole a solenoide.
|
(13) |
 |
Il sottosistema attuatore a gas semi-ridondante.
Una forza di torsione, cioè un momento torcente, è il prodotto dell'inerzia e dell'accelerazione angolare. Per produrre forze torsive, piuttosto che l'accelerazione angolare, furono utilizzate le variazioni di velocità angolare ed il movimento d'inerzia. Per definizione, una torsione "pura" si può avere imprimendo due forze — parallele, uguali ed opposte — e comunque separate ad una certa distanza. Però la struttura della navicella non permetteva di fornire agli assi di pitch e yaw una "coppia pura", cioè tale da non agore sul centro di gravità del veicolo e quindi modificandone la traiettoria. Così le forze di torsione per l'imbardata erano fornite da due diversi ugelli: uno di piccola spinta posto su un braccio lungo 71,12 cm e l'altro di grande spinta posizionato su un braccio di 27,94 cm. Tutti gli ugelli per il ‘‘beccheggio’’ [pitch] erano orientati in un'unica direzione che non faceva ottenere una coppia. L'affidabilità di ogni mezzo-sistema era notevole: 9800 cicli per valvola; inoltre il regolatore di pressione poteva reggere almeno 500.000 cicli di apertura/chiusura. L'intero sottosistema degli ugelli "a vuoto" — cioè senza gas — pesava 5,443 kg.
Tutti i componenti elettronici e inerziali del sistema di controllo dell'assetto, eccetto il sensore solare, erano contenuti nel modulo elettronico-4. Al suo interno vennero posti i seguenti sottomoduli: amplificatore di commutazione, ‘‘comando logico del commutatore’’ [CS&L, Command Switch and Logic], elettronica per il controllo dell'antenna, ‘‘invertitore
trifase’’ [inverter tree-phase ▪ 18,5 W di massimo consumo], invertitore a singola fase [inverter single-phase ▪ 7 W], convertitore in continua per il controllo dell'assetto. I limiti termici di funzionamento per questo modulo andavano da 13 a 46 °C.
(14)
Il convertitore-commutatore di tensione per i vari sottosistemi.
sensore terrestre era composto da tre "rilevatori" [detector], cioè dei tubi fotomoltiplicatori PMT [PhotoMultiPlier]. Questi erano denominati A, B, C ed avevano un diametro di 1,905 cm. Il sensore si trovava precisamente allineato e montato sullo stesso braccio che teneva l'HGA. L'uscite dei PMT fornivano i segnali d'errore su due assi: roll e hinge. In particolare l'uscite erano modulate e "mescolate" [mixed] in modo che: A+B+C indicava l'acquisizione della Terra; A+B-C davano il valore di roll, A-B quello dell'hinge. I segnali d'errore passavano poi al sistema di controllo dell'assetto che azionava i circuiti logici e gli ugelli d'azoto. Il campo visivo del sensore era ampio 20° in hinge e 10° in roll.
(15)
|
|
 |
Diagramma a blocchi del sensore terrestre.
Dopo un'ora dal lancio, l'HGA era già stata ruotata con un angolo prefissato in maniera che la Terra si trovasse entro un angolo di cono "vicino" al sensore terrestre. Tre ore e mezzo dopo il lancio, la tensione di 26 V a 400 Hz passava dal radiatore all'elettronica del sensore. Se il comando apposito (l'RTC-1) non fosse stato eseguito, il comando di acquisizione della Terra sarebbe stato rimpiazzato da un circuito nell'invertitore a singola fase. Dopo l'attivazione del sensore, la navicella ruotava rispetto all'asse di roll finché non veniva "acquisita" la Terra. Una volta che il sensore terrestre dava esito positivo, la sonda veniva stabilizzata nel suo asse "fisso" z. L'uscita telemetrica riguardante l'intensità della luce proveniente dal corpo celeste individuato aiutava a capire se il sensore terrestre aveva visto "giusto". Praticamente da quel dato telemetrico si riusciva a capire se quella luce era della Terra o della Luna o peggio del Sole.
(16)
|
|
 |
La configurazione della sonda all'invio del comando di riacquisizione della Terra.
Anche nell'ultima fase della missione, il sensore terrestre avrebbe tracciato il nostro pianeta fino allo schianto sulla superficie lunare. I tubi fotomoltiplicatori erano gli stessi che vennero usati sul sensore terrestre a lungo raggio delle sonde Mariner R. Ogni PMT aveva un fotocatodo, che rispondeva in uscita con un ‘‘picco’’ [peak] di corrente — minimo 60 μA — alla lunghezza d'onda di 4400 Å (4,4 nanometri). L'apertura del tubo era davvero microscopica: solo 0,06 cm². Il dispositivo veniva garantito per almeno 100 ore di funzionamento. Inoltre fu utilizzato uno scudo termico composto da due dispositivi meccanici; i limiti termici di funzionamento andavano da -10 a +38 °C. Lo scudo termico aveva molteplici scopi: ombreggiare il sensore dai raggi solari quando la sonda avesse "acquisito" il Sole; proteggere l'ottica del sensore dalla luce solare diretta quando si doveva "cercare" la Terra; ombreggiare le superfici del fotocatodo nei PMT durante la manovra propulsiva di metà corsa. La protezione dal Sole per il sensore terrestre pesava 580,6 grammi.
sensori solari erano dispositivi ottici, cioè dei rilevatori fotoconduttori in sulfide di cadmio. Di questi sensori c'erano due coppie primarie e due secondarie, che fornivano un campo visivo combinato di 4π steradianti (una sfera per definizione). Ogni sensore solare primario conteneva una singola cella rilevatrice, invece un sensore solare secondario ne conteneva quattro di queste celle. L'utilizzo di quest'ultimi sensori era limitato solo quando la navicella stava cercando il Sole. Una volta che la luce della nostra stella era acquisita, solo i sensori primari venivano utilizzati per mantenere la sonda orientata.Questi dispositivi davano i segnali di errore nel posizionamento rispetto agli assi y e z. I segnali arrivavano ai circuiti logici del controllo dell'assetto e quindi agli ugelli d'azoto compresso. Così l'asse x, quello verticale di rollio, veniva orientato verso il Sole. Una positiva deviazione angolare nel beccheggio o nell'imbarda, rispetto al Sole, avrebbe dato un errore negativo su un particolare asse. Se una cella era completamente esposta al Sole, la sua resistenza elettrica sarebbe stata di circa 1000 Ω. Invece se l'esposizione fosse stata della metà, allora la resistenza si sarebbe attestata sui 6000 Ω. Infine se la non c'era esposizione alla luce solare, praticamente il buio, la resistenza avrebbe superato il milione di Ohm.
Le tensioni in uscita, che rappresentavano analogicamente gli errori di posizionamento per due assi, erano date da precise equazioni. La resistenza di carico della navicella era di 99.000 Ω, mentre la tensione di alimentazione negativa/positiva per i sensori solari era di 16,8 V. Il peso [grammi] di questi dispositivi ottici variava: 48,08 (per ogni primario); 34,93 (per quelli secondari del beccheggio); 34,19 (per quelli secondari dell'imbardata). I limiti termici di funzionamento erano: -13
¸ 46 °C (per i quattro primari) e -75 ¸ 75 °C (per i quattro secondari). Comunque la loro affidabilità era oltremodo elevata: 256.508 ore, come a dire più di 29 anni senza aspettarsi un guasto.
(17)
L'attuatore "a perno" dell'HGA.
attuatore dell'HGA funzionava da meccanismo di guida con un limitato servo-movimento. Dietro comando, si muoveva fino a raggiungere la posizione che aveva quando era stata tolta l'alimentazione. Naturalmente l'attuatore teneva la posizione fino al successivo comando. Un ‘‘innesto’’ [clutch] limitante di torsione evitava danni dovuti ad eventi accidentali tipo procedure di test da Terra, "ritorni" troppo repentini ecc. La ‘‘reazione di ritorno’’ [feedback in gergo] era data da un doppio potenziometro a risoluzione infinita. Un elemento di quest'ultimo dispositivo serviva per porre l'HGA in un predeterminato angolo prima dell'acquisizione della Terra. L'altro elemento del potenziometro forniva — via telemetria — la posizione dell'antenna. In pratica il dispositivo era un semplice servomeccanismo ad ingranaggio completamente alloggiato in una scatola d'alluminio sigillata. Il sensore terrestre era perfettamente allineato e montato nello stesso braccio che portava l'HGA. La navicella veniva ruotata finché il sensore terrestre non trovava la Terra.
(18)
Circuito del servomeccanismo.
La massima velocità della ruota ad ingranaggi era di tre giri l'ora. Il "blocco" che fissava la posizione dell'HGA non richiedeva energia perché il circuito d'attivazione rimaneva spento finché non serviva una correzione. Se l'errore nel posizionamento dell'antenna superava i due gradi, allora il servo-meccanismo lo riduceva ad un grado. Per eseguire queste correzioni serviva poca energia: meno di 4 W. Naturalmente anche l'attuatore aveva uno scudo solare, che era montato sopra la scatola della ruota ad ingranaggi. I limiti termici di funzionamento andavano da -24 a +125 °C. Circa un'ora dopo il lancio, quando il ‘‘velo’’ [shroud] veniva espulso dalla sonda, lo scudo solare era attivato in maniera meccanica. Praticamente l'HGA ruotando per la prima volta fissava il suo scudo nella posizione che avrebbe mantenuto per il resto della missione.
Il
sottosistema pirotecnico si componeva di circuiti elettronici e logici che innescavano gli attuatori esplosivi. Infatti per dispiegare i pannelli solari e controllare il propulsore di bordo servivano dei dispositivi pirotecnici. Le cariche d'accensione nei pannelli solari tiravano via i ‘‘pioli’’ [pin] di contenimento. Questi dispositivi rilasciavano i pannelli solari dietro comando del CC&S. Il propulsore in particolare era controllato da una serie di valvole; alcune normalmente aperte e altre chiuse. L'accensione veniva attuata con l'"apertura" tramite cariche esplosive delle valvole normalmente chiuse. In maniera analoga, lo spegnimento avveniva con la "chiusura" delle valvole normalmente aperte. Tutte le cariche esplosive ovviamente potevano essere accese una sola volta.La navicella pesava in totale 365,82 kg (di 173,04 kg il solo sistema televisivo). I modelli “Block III” dal Ranger-6 al 9,
costarono un totale di 173,1 milioni di $. Nella fattispecie, ognuna di queste sonda aveva un costo di 23 milioni di dollari. Inoltre la gestione di ogni missione costava 34,7 milioni di dollari.
|
(19) |
|
Un particolare delle sei telecamere Vidicon.
Gli unici strumenti scientifici a bordo erano sei
telecamere Vidicon (peso senza i componenti elettronici: 17,21 kg). Il sistema video era diviso in due "catene". Ognuna di queste aveva: un'unità trasmittente, una batteria energetica, un ‘‘ordinatore’’ [sequencer]. Il sistema televisivo era elettricamente completo e indipendente dal resto della navicella. L'unica eccezione era la ricezione dei comandi che utilizzava l'antenna ad alto guadagno.
|
(20) |
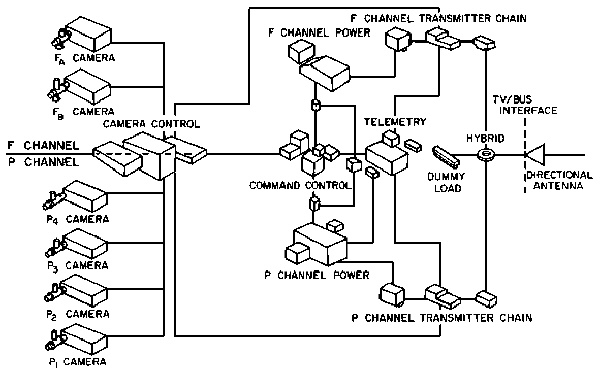 |
Diagramma a blocchi del sistema televisivo.
"catena"-F [da Full scan, ‘‘scansione completa’’] era composta da due telecamere. Una (A) aveva un ‘‘campo visivo’’ [FOV, Field Of View] ampio 25°. La lunghezza focale era di 25 mm ed un tempo d'esposizione di 5 ms. L'altra (B) invece aveva: un FOV stretto (8,4°); una lunghezza focale di 76 mm ed un tempo d'esposizione di 2 ms. L'"area attiva" per le due telecamere era di 11,176 x 11,176 mm². Questa superficie si divideva in 1150 linee (ciascuna composta da 1150 pixel). Per motivi di costrizione nella banda di trasmissione video, il tempo necessario alla scansione era 2,56 secondi. Infatti la frequenza di scansione orizzontale era di 450 Hz (1150/450=2,56). Le due telecamere operavano in sequenza (prima B e poi A), quindi fra due foto consecutive a cura della stessa telecamera trascorrevano circa 5,12 secondi. Quando una telecamera veniva esposta e ‘‘letta’’ [read-out], cioè scansionata, l'altra veniva cancellata e preparata.
|
(21) |
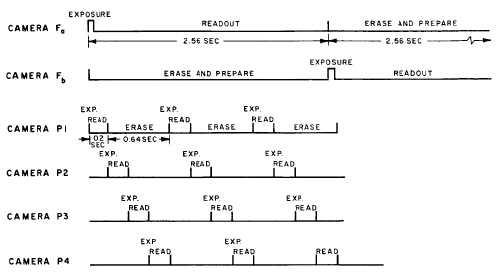 |
Sequenza delle riprese per le telecamere F e P.
"catena"-P [da Partial scan, ‘‘scansione parziale’’] era composta da quattro telecamere identiche: P1, P2, P3, P4. Le prime due (P1 e P2) avevano: un angolo visivo stretto (2,1°), la lunghezza focale di 76 mm ed un tempo di esposizione di 2 ms. Invece le altre due (P3 e P4) avevano: un angolo visivo ampio (6,3°), la lunghezza focale di 25 mm ed un tempo d'esposizione di 5 ms. L'"area attiva" per queste quattro telecamere era di 2,794 x 2,794 mm². In quel piccolissimo quadrato erano contenute 300 linee (ciascuna composta da 300 pixel). La scansione durava 0,2 secondi, infatti la frequenza orizzontale si attestava sui 1500 Hz (300/1500=0,2). La sequenza di ripresa era rigorosamente: P1, P3, P2, P4. Quindi venivano alternativamente utilizzati gli obbiettivi da 76 (P1, P2) e 25 (P3, P4). In totale l'intera sequenza di una ripresa P richiedeva 0,84 secondi. Secondo i calcoli, l'ultimissima immagine "completa" sarebbe stata ripresa fra 2,56 e 5,12 secondi prima dell'impatto. Invece per l'ultima immagine "parziale", questa sarebbe stata ripresa fra 0,2 e 0,4 secondi prima dello schianto al suolo lunare.
Ognuna delle sei telecamera, dietro l'otturatore aveva un tubo Vidicon lungo 2,54 cm. La superficie del tubo era rivestita con un materiale fotoconduttivo, nel quale le aree chiare e scure — viste attraverso l'otturatore — formavano un'immagine. Un ‘‘fascio’’ [beam] di elettroni scansionava rapidamente la superficie. Il "raggio" di elettroni, a partire dalla resistenza relativa, differenziava le aree chiare da quelle scure. Infatti le aree luminose avevano una resistenza elettrica più alta, mentre l'aree scure presentavano una resistenza più bassa. Nel momento in cui il fascio spazzava trasversalmente l'immagine, questa era convertita in un segnale elettrico; che poi era amplificato per essere teletrasmesso a Terra.
(22)
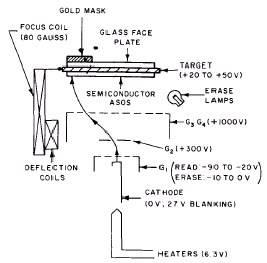
Gli elementi della telecamera Vidicon.
Quando l'immagine era letta, la superficie foto-conduttiva doveva essere ‘‘raschiata via’’ [erased]; infatti se non venivano tolte l'immagini residue, ci potevano essere delle interferenze con quelle riprese successivamente. L'
elettronica delle telecamere (peso: 22,08 kg) implementava sia la sincronizzazione delle sequenze, che l'amplificazione e il ‘‘mixaggio’’ [mixing] dei segnali video. La sincronizzazione veniva controllata dall'ordinatore. La "finestra" da cui le telecamere avrebbero visto la superficie lunare era ampia 83,87 cm².La sincronizzazione e il controllo dei segnali per i canali-F e -P era fornita rispettivamente dagli ordinatori F e P. Ogni ordinatore conteneva: un video combinatore, un programmatore di controllo ed unità energetica. L'uscita di ogni
video-combinatore era convertita in un segnale modulato in frequenza per l'appropriato trasmettitore radio. Questi operavano a frequenze "centrate" rispetto a 960,58 MHz (downlink telemetrico della sonda). Ogni canale aveva: un trasmettitore modulato in frequenza (con un modulatore, due moltiplicatori di frequenza, un amplificatore intermedio di potenza); un amplificatore di potenza da 60 W, un processore telemetrico, un'unità energetica.
|
|
|
Ripartizione delle frequenze per il sistema video.
Il
trasmettitore per il canale-F operava sui 959,52 MHz. La larghezza di banda di circa 900 kHz era così suddivisa: i primi 177 kHz per la banda video e 225 kHz per la telemetria a 15 punti. In particolare, solo la telecamera B aveva un'"identificazione" precisa: un tono sui 144 kHz. Anche il canale-P centrato sui 960,58 MHz conteneva sia la banda video (200 kHz) delle quattro telecamere, che la telemetria a 90 punti (220-225 kHz). I due canali, A e B, doveva essere "mixati". In questo modo veniva prodotto un singolo segnale in linea per l'antenna ad alto guadagno. Il mixaggio delle due uscite veniva compiuto da un mixer ibrido a 4 porte. Metà della potenza era dissipata su un carico inerte e l'altra metà inviata alla sonda. L'uscita del trasmettitore telemetrico da 3 W e l'uscite dei trasmettitori video erano combinati in un accoppiatore direzionale. Le velocità di trasmissione dei canali F e P — per ogni telecamera — erano rispettivamente 260.000 e 200.000 bit/secondo. La capacità di trasmissione del sistema a RF per ogni canale era di 1.170.000 bit/secondo.I
sistemi di comando e controllo avevano la capacità di:1. spegnere i canali F e P eseguendo l'RTC-5;
2. trasferire il comando d'attivazione del clock backup all'unità di controllo;
3. inibire l'attivazione del clock del canale F per le 32 ore successive alla "separazione";
4. inibire lo spegnimento del clock tramite l'esecuzione dell'RTC-5 nelle 32 ore successive alla separazione;
5. attivare la modalità telemetrica cruise-mode prima del lancio o fino a 30 minuti dopo la separazione;
6. controllare e concedere (con i diodi d'isolamento) dell'eventuale energia elettrica supplementare.
C'erano due comandi per accendere il sistema video: uno proveniva dal CC&S, l'altro dal sistema di comando. Nel primo caso, nel CC&S il comando era già memorizzato e veniva eseguito durante la modalità terminale dietro un RTC inviato da Terra. Anche l'accensione dal sistema di comando veniva avviata da un RTC trasmesso da Terra e fungeva da riserva se il CC&S falliva. In questo caso si sarebbe usato il ‘‘temporizzatore di riserva’’ [clock backup] del canale F. Questo dispositivo a stato solido (cioè senza parti mobili) aveva una precisione, rispetto al contatore del CC&S, di ± 5 minuti. Questo timer s'attivava automaticamente alla separazione dallo stadio Agena e poteva essere bloccato dal comando RTC-5 solo dopo trentadue ore.
Se c'era una discrepanza maggiore/minore rispetto al CC&S, il clock backup veniva ignorato. Questo poteva succedere se la manovra di correzione della traiettoria non avesse fatto coincidere il tempi del clock backup e dei normali comandi d'accensione. Non tutto l'intero sistema televisivo veniva attivato, gli stadi di amplificazione finali di potenza in ciascun trasmettitore rimanevano spenti. Il ‘‘riscaldamento’’ [warm-up] permetteva a ciascuna catena di raggiungere la piena potenza. Gli ottanta secondi venivano conteggiati dall'ordinatore (peso: 3,18 kg). Se quest'ultimo dispositivo si fosse guastato, un altro comando del CC&S avrebbe automaticamente riscaldato le due catene. Il sistema video inviava un impulso 16, 24, 32, 48, 64 ore dopo l'attivazione del clock backup. In questo modo si poteva sapere se le telecamere F si fossero state accidentalmente accese. Con tutte queste misure, era assai probabile che almeno un catena sarebbe stata funzionante.
Le modalità telemetriche del sistema video
erano due:a. “Cruise mode”, dove venivano inviati i dati telemetrici (undici parametri e quattro riferimenti) raccolti da 15 punti. Brevemente erano misurati: voltaggio e corrente nelle batterie, temperature nel sistema video, funzionamento del clock backup ecc. Il codificatore dati poneva queste informazioni analogiche in una sottoportante da 3000 Hz nel canale 8. Durante la manovra di ‘‘metà corsa’’ [midcourse] veniva utilizzata la TM-2.
b. “Terminal mode”, con l'inizio del "riscaldamento" della catena F succedevano due eventi precisi: l'informazioni telemetriche a 15 punti venivano commutate dal canale 8 alla portante del canale F; l'informazioni telemetriche a 90 punti erano trasmesse sulle sottoportanti del canale 8 e del canale P. Solo in questa modalità si aveva un segnale modulato, centrato sui 960,05 MHz, che nel suo spettro conteneva i due canali A e B. Normalmente questa modalità era attivata dal CC&S quindici minuti prima dell'impatto.
Il
sistema energetico consisteva in: due batterie (peso totale: 39,12 kg), due regolatori di tensione per corrente elevata (per le catene F e P) ed un regolatore di tensione per la corrente ridotta (solo per il canale P). La batteria per il canale F aveva una capacità iniziale di 27 Ah. Il suo voltaggio al lancio, in condizione di "non carico elettrico" era di 39,1 V. Dal 32,5 minuti dopo il lancio all'accensione delle due telecamere F la batteria forniva 0,05 A l'ora per il clock backup. Solo all'attivazione del clock, il voltaggio della batteria scendeva a 37,4 V. Al riscaldamento della catena F la batteria forniva 33,5 V a 7,7 A. Infine quando le due telecamere erano pienamente operative la tensione nella batteria scendeva a 32,5 V alla corrente di 13,5 A.La batteria per il canale P
aveva una capacità iniziale di 30 Ah. Il suo voltaggio al lancio era di 35,6 V; nella cruise mode forniva 0,15 A l'ora. Al "riscaldamento" della catena P, questa batteria forniva 32,5 V a 10,5 A. Infine in piena operatività la tensione nella batteria scendeva a 32 V alla corrente di 15,5 A. Ogni regolatore di tensione per la corrente elevata [HCVR, High-Current Voltage Regulator] tenevano — nella fase finale della missione — la tensione sui canali F e P rispettivamente a: 27,52 e 27,5 V. Invece il regolatore di tensione per la corrente ridotta [LCVR, Low-Current Voltage Regulator] forniva alla catena P una tensione di: 27,7 (durante la cruise mode) e 27,78 (nell'operazioni della terminal mode) V. Ognuna di queste batterie, quella principale e quella di riserva, era capace di far funzionare il sistema video per circa un'ora. Il CC&S aveva una misura di emergenza: a 12’ dall'impatto avrebbe eseguito l'RTC-7, che accendeva il sistema video. Se non succedeva nulla, allora il calcolatore avrebbe eseguito un comando specifico (TV-3), che accendeva sia il sistema video che i due trasmettitori da 60 W.Il
controllo termico delle telecamere veniva attuato con metodi di bilanciamento passivo. Praticamente non c'erano né griglie d'aerazione, né ventilatori. Tutto era affidato ad un sottile "velo" di alluminio lucido che ricopriva la sonda e ad alcuni strati isolanti. La vernice usata per il "velo", gli strati isolanti, la disposizione dell'equipaggiamento interno, l'irraggiamento solare, il quoziente di assorbimento erano valutati "a tavolino". Valutando certe proprietà intrinseche dei materiali, simulando le possibili posizioni della sonda e dell'irraggiamento solare si arrivò a definire il sistema passivo di controllo termico.
|
(24) |
 |
Schema esemplificativo dalla ripresa di una foto alla sua registrazione su nastro
I segnali trasmessi dalla navicella dovevano essere riconvertiti dal dominio elettromagnetico al dominio del visibile. Questa conversione doveva essere trattata con la massima attenzione e conformità all'originale per la riproduzione visiva dell'immagine ripresa. I segnali dalla navicella erano amplificati e separati dalle stazioni d'ascolto di Goldstone. Le variazioni di frequenza del segnale ricevuto venivano convertite in variazioni di ampiezza utilizzando due demodulatori, uno per ogni canale. L'"uscita" dei due dispositivi era composta dagli stessi segnali video generati dalle telecamere. Questi segnali video venivano usati per controllare l'intensità di un fascio di elettroni abbinati ad un tubo catodico. Il dispositivo nel sistema ricevente terrestre veniva ‘‘scansionato’’ [scanned] all'unisono con il fascio di elettroni ripreso dalle telecamere. Quindi un tubo a raggi catodici CRT ricostruiva l'immagine originale, che poi veniva registrata su un "nastro" [film] da 35 mm. Questo compito toccava al Ground Recording Equipment del Ranger Operational Ground Station di Goldstone.
I dispositivi di registrazione erano simili ai cinescopi commerciali, cioè a dei videoregistratori. Ogni film recorder aveva un dispositivo specifico di alimentazione ad alta tensione: l'HVPS [High-Voltage Power Supplie]. Naturalmente nel rispetto del principio di ridondanza, c'erano sia un registratore che un alimentatore di riserva. Praticamente per ogni canale, F o P, c'era almeno un'unità di registrazione. Quindi nello stesso tempo venivano registrate sia un'immagine di una telecamera F, che una proveniente da una telecamera P. Alla Pioneer Station un solo cinescopio veniva utilizzato per registrare l'immagini provenienti dalle quattro telecamere P. Mentre nell'Echo Station c'erano due cinescopi che registrava entrambi i canali. La velocità di registrazione dei film recorder era di 3,048 metri/secondo e doveva bastare per almeno 15’ di ricognizione fotografica. In linea teoria, nei magazzini ci doveva essere 61 metri di nastro per 15’ di missione.
|
(25) |
|
|
Una rappresentazione della sonda che piomba sulla superficie lunare. La freccia tratteggiata (3--- ) indica il piano di volo.
CARATTERISTICHE DELLA TRAIETTORIA
La traiettoria lunare da imboccare poteva essere rappresentata da un'unica ellisse conica il cui perigeo era quasi uguale al raggio dell'orbita di parcheggio. Mentre il perigeo si collocava a due volte la distanza Terra-Luna. Questa ellisse di trasferimento Terra-Luna era stabile rispetto alle coordinate inerziali geocentriche. Dal punto di vista geometrico era necessario che la Luna intersecasse l'ellisse di trasferimento nel momento previsto; perciò la sua rotazione avrebbe determinato il momento del lancio. Il piano della traiettoria ellittica comprendeva sia Cape Canaveral al momento del lancio, che la Luna al momento del cosidetto ‘‘incontro’’ [encounter]. La geometria del piano era completata: dalla traiettoria di ascesa diretta a partire dalla base in Florida; dall'orbita di parcheggio; dall'"arco di costeggio" terrestre. Poi lo stadio di fuga avrebbe inserito la sonda vicino al perigeo dell'ellisse di trasferimento. Così si poteva sfruttare al massimo la capacità di carico. Per compensare l'inevitabile rotazione terrestre, sia l'Azimut di lancio (cioè l'angolo fra il Sole e la proiezione sull'Equatore) che l'"arco di costeggio" venivano computate insieme.
IL VETTORE DI LANCIO
Il ‘‘sovralimentatore’’ [booster] Atlas D era composto da due stadi e mezzo (per l'appunto uno più uno e mezzo), come propellenti usava ossigeno liquido e cherosene. Invece il secondo stadio, Agena B, usava come propellenti IRFNA [Inhibited Red Fuming Nitric Acid] e UDMH [Unsymmetrical Di-MethylHydrazine, ‘‘Di-MetilIdrazina Non simmetrica’’]. Questo stadio avrebbe fornito due accensioni: la prima per l'inserimento nell'orbita di parcheggio e la seconda — alla fine del "costeggio" — per raggiungere la velocità sufficiente a staccarsi dalla gravità terrestre e viaggiare nello spazio. La spinta del booster a livello del mare era di 1.645,84 kN (167.829,2 kg forza). In questo modo si poteva imprimere una velocità di 20.277,73 km/h a 1.179.340 kg (il peso dell'Atlas D compresi i propellenti). Invece la spinta dell'Agena B nello spazio era di 71,17 kN (7.257,48 kg forza).
Il secondo stadio avrebbe impresso due velocità: 28.163,52 km/h (per l'inserimento nell'orbita di parcheggio) e 39.496,16 km/h (per l'inserimento nella traiettoria lunare). Il booster sarebbe stato guidato dal General Electric Radio Command Guidance Equipment e dal Burroughs Ground Guidance Computer della base di Cape Canaveral. Invece il secondo stadio aveva un sistema di guida autonomo composto da: dispositivi di sincronizzazione, sistemi di riferimento inerziale, misuratore di velocità, dispositivo infrarosso per la ‘‘percezione’’ [sensing] dell'orizzonte.
A causa delle varie costrizioni (di traiettoria, di missione ecc.) il periodo di lancio si presentava ogni ventotto giorni e ne durava esattamente sei. Ogni finestra di lancio giornaliera aveva un'ampiezza variabile fra i 90 e 150 minuti. Il volo sarebbe durato dalle 65 alle 70 ore. Dallo schema sottostante, si può notare che il periodo "giusto" per fotografare la faccia visibile era ristretto solo nel terzo quarto della Luna calante.
|
(26) |
|
|
Il 27 Luglio 1964 era il primo giorno utile per il lancio, il primo countdown iniziò alle 06:47 locali (12:47 GMT). A T-51’ il personale addetto allo stadio Agena B chiese un'interruzione di 30 minuti per verificare la telemetria della batteria. Poi si aggiunsero altri problemi, alle 12:35 locali fu deciso di rimandare il lancio.
Alle 07:04 locali — 13:04 GMT — del 28 Luglio iniziò il secondo countdown. Alle 16:50:07.873 il razzo Atlas D
–Agena B con a bordo la sonda decollò dall'ETR di Cape Canaveral, allora Cape Kennedy. Il decollo avvenne quando la finestra di lancio giornaliera si era aperta da appena 7,9 secondi. L'Azimut inerziale di lancio (cioè l'angolo fra il Sole e la proiezione sull'Equatore) era di 96,6° nord-est.
|
(27) |
|
|
|
(28) |
Appena lasciata la rampa di lancio, il booster (lo stadio Atlas D) attuò la programmata manovra di beccheggio finché non si spense. Nel corso della sua accensione, le regolazioni dell'assetto e lo spegnimento del "motore" venivano comandati dal computer di guida a Cape Canaveral. Inoltre il calcolatore avrebbe regolato l'altitudine e la velocità al momento in cui l'Atlas D si fosse spento. Alle 16:55:12.8 [T+305’’] il velo che proteggeva la sonda fu correttamente espulso. Alle 16:55:15.9 [T+308,1’’] il booster, ormai esaurito il suo compito si separò. La prima accensione del secondo stadio Agena B iniziò alle 16:56:57.5 [T+349,7’’].
Alle 16:57:49 il veicolo spaziale superò l'orizzonte di Cape Canaveral, così DSS-71 perse il collegamento. La prima accensione dell'Agena B terminò alle 16:58:34,3 [T+08:26.4]. Il razzo acquisì una velocità di 28.080 km/h e s'inserì in orbita di parcheggio a quota 188 km. Il ‘‘costeggio’’ lungo un'orbita quasi circolare in direzione sud-est durò 19,97’. La sonda fu attivata dietro comando alle 17:13:00. Alle 17:18:32.1 [T+28:24.1] ci fu la seconda ed ultima accensione che durò 88,9’’ come previsto. Alle 17:20:01 [T+29:53] lo stadio Agena B
–sonda, ancora uniti, s'inserirono in una quasi perfetta orbita di trasferimento Terra-Luna.
|
(29) |
|
|
Profilo della traiettoria di ascesa (le quote sono in miglia nautiche = 1,852 km).
|
(30) |
|
|
Sequenza degli eventi fino all'"acquisizione" della Terra (lo schema non è in scala).
| L'ORBITA PRE-MIDCOURSE |
Come riferimenti furono considerati i parametri orbitali alle 17:19:56. In quel preciso attimo
Ranger-7 era a circa 189,5 km di quota dai 12,676° sud e 14,648° est. Per la cronaca, la distanza dalla Terra era geocentrica cioè a partire dal centro. Quindi per calcolare la distanza fra la sonda e la superficie, doveva essere sottratto RE pari a 6.378,14 km. La navicella si allontanava dal nostro pianeta alla velocità relativa di 10,533 km/s (37.918,8 km/h). L'orbita di trasferimento era inclinata di 28,958° rispetto all'Equatore. Il semiasse maggiore dell'orbita iperbolica era di 269.582 km con un'eccentricità di 0,97565. Senza la manovra di metà corsa, l'impatto sarebbe avvenuto alle 12:43:29 ± 5,2’’ del 31 Luglio dopo 67,394 ore di volo. Le coordinate lunari furono stimate in -12,35° in latitudine e 203,94° in longitudine. La velocità dell'impatto sarebbe stata di 2,63 km/s (9468 km/h) con un angolo di 17,02°.Alle 17:20:50 l'MTS (DSS-59) del complesso DSN di Johannesburg acquisì il segnale. Il meccanismo dell'antenna entrò in “modalità automatica di tracciamento” alle 17:21:00. Sia l'Agena B che navicella entrarono nell'ombra della Terra alle 17:21:33 [T+31:25
]. L'antenna della stazione mobile perse il segnale principale alle 17:21:39, comunque DSS-51 l'aveva acquisito un secondo prima. L'antenna della stazione sudafricana fu messa in autotrack alle 17:21:53; tre secondi dopo individuò il "fascio" principale del segnale trasmesso dalla sonda. Comunque dalle 17:22:20 il ricevitore della DSS-51 non poté più captare in maniera continua.
|
|
|
Schema degli eventi più significativi della missione rispetto alla Terra e alle stazioni DSN.
| LA SEPARAZIONE |
Alle 17:22:31.1 [T+32:23.3] i morsetti d'interfaccia fra sonda e ultimo stadio furono attivati. Alle 17:22:36.1 [T+32:28.1
] lo stadio Agena B si separò dalla navicella, che assunse la denominazione ufficiale di Ranger-7. Gli inevitabili movimenti angolari conseguenti alla separazione rientrarono nel limite specifico di 48 millirad al secondo [mrad/s]. Come programmato, lo stadio Agena subito dopo la separazione eseguì un'imbardata di 180°. Praticamente ruotò sul suo piano orizzontale e si pose in una posizione antitetica alla navicella. Alle 17:29:06.3 eseguirà un'ultima retro-accensione per evitare una qualsiasi interferenza futura con Ranger-7. Inoltre le possibilità di vedere impattare lo stadio di fuga sulla Luna si ridussero notevolmente. Infatti i calcoli successivi mostrarono che lo stadio Agena B passò a 3660 km dal nostro satellite tre ore circa dopo l'impatto della sonda.Dalle 17:22:38 alle 17:23:03 DSS-59 raccolse cinque "campioni Doppler" da cinque secondi ciascuno. Alle 17:22:40 si attivò il clock backup, il temporizzatore del sistema video. Alle 17:28:07 il trasmettitore della DSS-51 fu commutato a quello dell'MTS nel tentativo di riguadagnare il segnale. Così alle 17:32:36 la stazione mobile localizzò il fascio principale. Alle 17:32:55 DSS-51 perse il collegamento con la sonda, alle 17:37:53 anche l'MTS successo lo stesso. Come previsto DSS-59 aveva funzionato per 17’ e 3’’; da questo punto in poi uscirà di scena. Seppure la telemetria ricevuta fosse buona, DSS-51 non ottenne informazioni sullo spostamento Doppler a due vie.
Nel frattempo, alle 17:35:24, la stazione DSS-41 acquisì il segnale. In suo trasmettitore fu acceso alle 17:37:50. Il ‘‘bloccaggio a due vie’’ [two-way lock] venne confermato alle 17:38:48. I dati sullo spostamento Doppler a due vie furono presi solo dalle 17:45:02 a causa di un problema elettronico. Per motivi mai chiariti, le misurazioni della corrente per le batterie del canale P e F (punti 15-3 e 15-10) furono difficili da interpretare. Infatti variavano continuamente fra 0 e 500 mA, quando i valori nominali nella cruise mode erano 150 mA (per la batteria del canale P) e 50 mA (per quella del canale F).
Alle 17:50:00 il CC&S di bordo comandò l'estensione dei pannelli solari, che accade all'istante. Anche questo evento apportò inevitabili movimenti angolari ai tre assi di riferimento. Gli spostamenti in mrad/s furono di: 2 [pitch]; -7 [yaw]; 0,4 [roll] sempre ben al di sotto del limite di 48 mrad/s. La fase di "acquisizione" del Sole iniziò alle 17:53:00.
Ranger-7 uscì dall'ombra della Terra alle 18:00:06 (T+01:14:52). La navicella fu ruotata di 110° e 26° rispettivamente all'asse y e z. I conseguenti spostamenti angolari apportati furono rispettivamente di: 5 e 2 mrad/s. L'acquisizione del Sole si completò alle 18:05:00. Da quel momento in poi il veicolo spaziale era in grado di raccogliere energia dai pannelli solari. Il pannello sinistro forniva più corrente di quello destro perché fu il primo ad essere illuminato e quindi a riscaldarsi più velocemente. Alle 20:21:00 iniziò l'acquisizione della Terra, in quel momento l'angolo Terra–sonda–Sole era di 55°. Il sensore terrestre trovò il nostro pianeta dopo una rotazione di 310° rispetto all'asse "fisso" x. L'acquisizione della Terra fu completata alle 20:44:00. Il conseguente spostamento angolare apportato all'asse di rollio fu di -2,4 mrad/s.DSS-51 acquisì il segnale della sonda alle 20:45:50, il two-way lock sarà poi confermato alle 21:51:03. DSS-41 inviò due RTC-0, alle 21:15:00 e 21:16:00. Sempre la stazione australiana alle 21:19:00 trasmise l'RTC-3 [antenna switchover]. L'angolo dell'HGA, rispetto al piano orizzontale, era già stato impartito nelle operazioni di pre-lancio con l'RTC-2: centoventidue gradi sessantesimali. Dato che quell'orientamento assiale era già noto prima del lancio, l'uscite dei tre giroscopi sarebbero state correlate con la velocità di spostamento della Terra. La corretta esecuzione dell'RTC-3 fu verificata alle 21:19:38. Così
Ranger-7 comunicò con la Terra attraverso l'antenna ad alto guadagno. Alle 21:51:05 il trasmettitore della stazione australiana fu staccato per permettere la trasmissione a DSS-51. Però dalle 23:06:00 alle 00:10:50 del 29 Luglio DSS-41 riguadagnò la possibilità di trasmettere.
|
(32) |
|
|
La copertura delle stazioni DSN dal lancio (16:50) fino alle 23:59 del 28 Luglio
- 29 Luglio -
Alle 00:01:02 DSS-51 riguadagnò la ricezione del segnale fino alle 08:54:29. Alle 01:17:00 DSS-41 perse il collegamento poiché era finito il suo periodo di vista. L'acquisizione del segnale da parte di DSS-12 avvenne alle 06:44:10. Il trasmettitore della stazione californiana fu acceso alle 07:07:30. Invece quello di DSS-51 fu spento 30’’ dopo.
| MIDCOURSE |
Il MAG [Maneuver Analysis Group, ‘‘Gruppo di Analisi per la Manovra’’] poteva attuare una sola manovra propulsiva scegliendo fra un'ampia gamma di alternative. Una delegazione della Space Science Division del JPL in ogni caso doveva essere consultata se si voleva bloccare la midcourse. Bastava inviare un comando specifico (l'RTC-8) e la navicella sarebbe tornata nella modalità di viaggio. Ma non era una scelta facile: una volta inviato il comando in tempo reale, dovevano trascorrere 10.000 secondi (2,77 ore) prima di riprovare con un secondo tentativo. Per determinare con esattezza sia orbita finale di trasferimento, che le modalità della manovra propulsiva furono utilizzati centinaia di "campioni" di spostamento Doppler two-way ampi un minuto ciascuno. DSS-41 ne aveva acquisiti 258 fra le 17:53:32 e le 23:59:32 del 28 Luglio, mentre DSS-12 ne raccolse: 61 (fra le 07:11:32 per un'ora), 23 (fra le 08:12:32 per 22’), 74 (dalle 08:41:32 alle 09:58:32). Alle 07:27:00 all'SFOF avevano già completato i calcoli finali per ottenere la traiettoria più ottimale. I risultati furono questi:
|
|
magnitudine |
durata [secondi] |
tempo di avvio [GMT] |
|
rollio (roll) beccheggio (pitch) incremento di velocità |
5,563 [gradi] -86,803 [gradi] 29,7704 [m/s] |
25 392 48 |
10:00:44 10:10:09 10:27:09 |
Alle 08:50:00 e 08:52:00 DSS-12 inviò due RTC-0. L'SC-1 (“durata rollio”), l'SC-2 (“durata imbarda”) e SC-3 (“incremento di velocità”) furono inviati dalle 08:54:00 a due minuti di distanza l'uno dall'altro. DSS-12 verificò l'esatta esecuzione dei comandi rispettivamente alle: 08:54:40, 08:56:41, 08:58:41. La modalità telemetrica TM-1 terminò alle 09:22:40. DSS-12 di Goldstone alle 09:36:00 e 09:38:00 spedì altri due RTC-0. Alle 09:40:00 fu inviato l'RTC-3 per "scollegare" l'antenna ad alto guadagno. L'esecuzione di questo comando fu verificato 39’’ dopo. Da quel momento le comunicazioni con
Ranger-7 sarebbero avvenute solo con l'antenna omnidirezionale a basso guadagno.Nella cruise mode la temperatura delle celle solari si stabilizzò a 47 °C (per il pannello destro) e 45 °C (per quello sinistro). Anche la dissipazione termica dei pannelli era regolare. Alle 10:00:00 sempre dalla stazione californiana fu trasmesso l'RTC-4. La sua esecuzione venne confermata alle 10:00:38. Nel frattempo i due pannelli solari ridussero la fornitura di energia "grezza" [raw] a circa 150 W.
|
|
|
La copertura delle stazioni DSN dalle 0 del 29 Luglio alle 0 del 30 Luglio.
L'accensione degli ugelli per "rotolare" la sonda di 5,56° iniziò alle 10:00:44 e durò 25 secondi. Sempre gli ugelli ad azoto compresso furono accesi alle 10:10:09 per 392’’ [5’ e 42’’] in maniera da attuare il beccheggio. In pratica venne eseguita una rotazione sul piano orizzontale di 86,8° verso destra. Dalle 10:13:41 alle 10:13:51 — quando l'angolo di beccheggio passò da 47,4° a 49,6° — i pannelli solari non furono più in grado di produrre i 150 W (il carico d'energia minimo).
Così il CC&S commutò l'acquisizione energetica dalla batteria di bordo. Alle 10:16:43 iniziò la modalità telemetrica TM-2. Alle 10:27:09, quando la sonda era ad una distanza e velocità geocentrica rispettivamente di 169.000 km e 10,533 km/s, il propulsore si accese. Però il CC&S di bordo non fu molto preciso nell'accensione, che durò 50’’ (10:27:09-10:27:59) invece dei 48 previsti. DSS-12 spedì i dati sul tracciamento all'SFOF, che alle 10:27:58 definì la nuova traiettoria assunta dal
Ranger-7. Dopo la spinta propulsiva in avanti (29,89 invece che 29,77 m/s), la distanza geocentrica era aumentata di 75,12 km. Anche la velocità della navicella rispetto alla Terra aumentò fino a 12,071 km/s. Infine alle 10:30:40 terminò la TM-2 ed iniziò la TM-3, che sarebbe durata per circa 48 ore.
|
(34) |
|
|
| L'ORBITA POST-MIDCOURSE |
Considerando gli errori nell'imbardata, beccheggio, variazione di velocità (rispettivamente: -0,117°; 0,047°; -0,073 m/s), il punto d'impatto fu spostato ai -10,68 e -20,68 gradi di latitudine e longitudine selenocentrica. L'area d'arrivo era compresa in un'ellisse di 482,8 x 80,5 km². L'impatto sarebbe avvenuto esattamente alle 13:25:48.455 ± 1’’ del 31 Luglio; cioè 68,09666 ore dopo il lancio. L'accensione automatica delle telecamere era prevista per le 13:09:00. Infine la velocità relativa d'impatto e l'angolo rispetto alla superficie lunare sarebbero stati di: 2,616 km/s e -64,20°.
(35)
Le traiettorie d'impatto per l'orbita pre-midcourse e post-tmidcourse.
La riacquisizione del Sole iniziò dalle 10:30:39. Ma già alle 10:32:55 i pannelli solari erano capaci di fornire il pieno carico energetico. Alle 10:36:19 i sensori solari acquisirono la luce della nostra stella. Gli inevitabili spostamenti angolari [mrad/s] apportati furono davvero minimi: 4 (pitch) e 0 (yaw). Inoltre dopo la manovra propulsiva, la Terra si trovò a -2° dal sensore terrestre. Quindi la sua riacquisizione avvenne nello stesso momento in cui fu riattivato il sensore terrestre (10:58:39). La stazione 12 di Goldstone inviò sia alle 11:21:00 che alle 11:23:00 due RTC-0. Alle 11:25:00 sempre la DSS-12 inviò l'RTC-3, che in praticò ordinò alla sonda di tornare a trasmettere con l'HGA. L'esecuzione di questo comando fu verificata dopo 39’’.
La commutazione dall'LGA all'HGA venne completata alle 11:25:43. DSS-41 acquisì il segnale di
Ranger-7 alle 14:13:55. Il trasmettitore posto nella stazione australiana fu acceso alle 18:42:20, DSS-12 poté spegnere il suo alle 18:42:41. L'Echo Station terminò il suo "periodo di copertura" alle 18:45:35. Infine la stazione 51 del DSN acquisì il segnale del veicolo spaziale alle 22:02:45. Naturalmente le tre stazioni raccolsero informazioni riguardo la definizione dell'orbita post-midcourse, praticamente dalla manovra di metà corsa in poi.
- 30 Luglio -
La copertura delle stazioni del DSN fu la seguente: il trasmettitore della stazione 51 funzionò dalle 01:45:36 alle 07:12:20. L'attività della stazione sudafricana terminò alle 09:12:03 con la perdita del segnale. Il trasmettitore della stazione 41 rimase attivo fino alle 01:45:22; il segnale di
Ranger-7 fu perso alle 01:49:00.
|
(36) |
|
|
La copertura delle stazioni DSN dalle 0 del 30 Luglio alle 0 del 31 Luglio.
Un altro periodo di copertura di DSS-41 andò dalle 14:36:03 (acquisizione del segnale), alle 23:40:00 quando fu spento il trasmettitore. La stazione 12 di Goldstone acquisì il segnale della navicella alle 06:55:30. Il trasmettitore della stazione californiana funzionò dalle 07:03:14 alle 18:59:13 (spegnimento e conseguente perdita del segnale). DSS-51 riprese contatto con
Ranger-7 alle 22:13:17, il trasmettitore della stazione sudafricana venne acceso alle 23:40:00. Anche in questo giorno, le tre stazioni del DSN acquisirono informazioni sull'orbita post-midcourse. Nei rispettivi periodi di copertura, ogni stazione raccolse campioni di dati Doppler della durata di un minuto ciascuno.
- 31 Luglio -
DSS-41 perse il collegamento con la navicella alle 01:59:00, alle 07:00:58 DSS-12 lo riacquisì; alle 07:30:00 s'aggiunse anche la Pioneer Station (DSS-11). Questa stazione doveva registrare su nastro l'immagini inviate e tracciare la sonda ma senza raccogliere dati Doppler. Dalle 07:34:32 alle 12:24:32 DSS-12 raccolse "campioni" di un minuto sia di dati Doppler a due vie che d'informazione angolare sul procedere della sonda verso la Luna. Il periodo di copertura della stazione sudafricana terminò alle 09:14:37. Anche se il trasmettitore di DSS-51 era spento dalle 07:30:16, la stazione acquisì i dati angolari della navicella.
|
(37) |
|
|
La copertura delle stazioni DSN dalle 0 del 31 Luglio al momento dell'impatto sulla Luna.
| LA NON NECESSARIA MANOVRA FINALE |
Dai dati sulla traiettoria risultò che le telecamere erano già correttamente orientate; quindi non serviva alcuna manovra. Infatti la direzione C manteneva un angolo di 6,8° rispetto al vettore-V d'impatto. La sonda si sarebbe schiantata con un angolo di 64,1° rispetto alla superficie. Per ottenere la migliore ricognizione fotografica fu deciso di accendere il canale P a 15’ dall'impatto. Per fare questo bastava inizializzare il contatore del CC&S con una manovra terminale (di durata minima, cioè un secondo). Il clock backup avrebbe acceso le telecamere F esattamente 67 ore e 45’ dopo la separazione dallo stadio Agena B, cioè a 18’ e 30’’ dall'impatto. Se il CC&S avesse poi fallito l'accensione del canale P, allora si poteva inviare il comando RTC-7 a 12’ dal momento previsto per l'impatto.
|
(38) |
 |
A = direzione di puntamento della telecamera A (25° campo visivo, catena F) B = direzione di puntamento della telecamera B (8,4° campo visivo, catena F) C = direzione centrale di puntamento delle quattro telecamere P
V = vettore della velocità d'impatto |
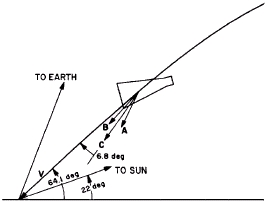 |
(39) |
Il primo movimento di beccheggio doveva disallineare l'orientamento Sole–pannelli. Così l'energia sarebbe stata fornita solo dalle batterie delle due catene. Con la successiva manovra d'imbardata, la sonda veniva ruotata di 90° verso sinistra rispetto al piano verticale. Infine il secondo beccheggio (un'inclinazione verso sinistra rispetto all'asse y) avrebbe orientato nella maniera ottimale le telecamere. Anche se la manovra terminale non fu attuata, a parte il disallineamento dei pannelli solari, era necessario mantenere l'HGA puntata sempre verso la Terra. Altrimenti l'immagini riprese non sarebbero arrivate al complesso di Goldstone. Quindi il sensore terrestre e l'attuatore dell'HGA dovevano funzionare alla perfezione. Fortunatamente la temperatura del sensore terrestre per la maggior parte della missione si attesto sui 16,67 °C (ben 18,3 sotto il limite massimo). Il consumo di azoto per il sistema di controllo dell'assetto in una missione Ranger “Block III” era stimato in 0,245 kg. La navicella ne consumò appena 0,072 kg sui 1,932 a disposizione.
|
(40) |
|
|
La manovra terminale per allineare correttamente le telecamere.
Alle 11:15:30 e 11:17:30 DSS-12 inviò i consueti RTC-0 che "resettavano" il sistema di comando. Poi furono inviati tre comandi con un valore nominale di un secondo: SC-4 [terminal maneuver first pitch duration], SC-5 [terminal maneuver yaw duration], SC-6 [terminal maneuver second pitch duration]. Nell'ordine, DSS-12 inviò: l'SC-4 alle 11:19:30, SC-5 alle 11:21:30, SC-6 alle 11:23:30. Poi furono inviati altri due RTC-0 (alle 11:51:00 e 11:53:00). Alle 11:55:00 l'Echo Station "spedì" il fatidico comando RTC-8 che in pratica scollegò il CC&S dal sistema di controllo dell'assetto. Alle 11:55:39 fu verificata la corretta esecuzione. Alle 12:17 la temperatura dei pannelli solari iniziò ad aumentare a causa dell'energia irradiata dalla Luna.
Alle 12:25:08 fu trasmesso l'RTC-6 [initiate terminal maneuver sequence]. L'invio dei comandi antitetici RTC-8 e RTC-6 era necessario per far attivare il sistema video dal CC&S. L'RTC-6 inviato alle 12:25:08 fu il ventiquattresimo ed ultimo comando da Terra.
Dalle 12:25:23 la stazione 12 del DSN raccolse dei dati per controllare l'orbita finale. Alle 12:25:48 s'attivò il contatore del CC&S, la navicella dai 6390 km/h s'avvicinava alla Luna con una velocità relativa di 1,551 km/s (5583,6 km/h). Alle 12:40 circa la sonda attraversò l'equatore lunare ad una distanza di 4933 km dalla superficie. I piani y e
z del veicolo spaziale erano inclinati rispetto all'equatore lunare di circa 5°. Alle 12:52:19 il codificatore dati commutò sulla modalità telemetrica IV. Questo significava che il CC&S funzionava secondo quanto prevedeva la fase finale. Nell'intera cruise mode varie temperature rimasero superiore la norma: quella nell'alloggiamento delle lenti si mantenne sui 19,4 °C (1,35 sopra). La temperatura dello scudo termico inferiore variò fra 23,3 e 24,4 °C (il valore nominale era 22,2 °C). A parte un lieve surriscaldamento (1,4 °C) nella batteria del canale P, non ci furono conseguenze negative.
| ATTIVAZIONE DEL SISTEMA VIDEO E RICOGNIZIONE FOTOGRAFICA!
Alle 13:07:15, quando la Luna era distante 2277 km e la sonda gli si avvicinava a 6903 km/h, il clock backup accese il canale F. Nello stesso istante s'attivò il processore telemetrico a 90 punti. La catena F fu riscaldata per 80’’ e divenne pienamente operativo dalle 13:08:36, quando la superficie lunare era distante 2126 km. Il trasmettitore della catena raggiunse un valore massimo di 41,1 °C (ma ben inferiore al limite di sicurezza pari a 60 °C).
|
(41) |
|
|
|
|
13:08:44.90; distanza: 2445,97 km; cam. B; longitudine e latitudine centrali: -13,09 e 350,07 gradi ovest La prima immagine in assoluto ripresa dalla sonda. L'altezza nella realtà corrispondeva a 360 km. La zona dove si schianterà la navicella si trova nell'angolo in basso a sinistra della foto. La risoluzione era 1000 volte migliore di un'immagine ripresa da un qualsiasi telescopio terrestre dell'epoca. |
|
|
(42) |
|
|
|
|
13:08:46; distanza: 2158,82 km; cam. A; longitudine e latitudine centrali: -13,2 e 330,04 gradi ovest La seconda immagine ripresa dalle sonda, trasversalmente (da un vertice ad un altro) sono 950 km. |
|
Alle 13:08:44.90 la telecamera B riprese la sua prima immagine, dopo 2,56’’ anche telecamera A raccolse la sua prima foto. Quindi le due telecamere proseguirono nella loro sequenza: ripresa, scansione, invio immagine telecamera B (2,56’’); ripresa, scansione, invio immagine telecamera B (2,56’’) e così via... Il CC&S previe le necessarie verifiche ordinò il riscaldamento della catena P alle 13:10:49. Le quattro telecamere acquisirono la piena operatività alle 13:12:09, ai 1723 km di quota.
|
(43) |
|
|
|
|
13:12:20; distanza: 1863 km; telecamere P; longitudine e latitudine centrali: -13,8 19 gradi ovest Le prime immagini dalle telecamere P: la nomenclatura in senso orario dall'alto a sinistra è: P3, P4, P2, P1. L'immagine P1 e P2 erano larghe circa 41 km. Il fondo di P2 si sovrappose all'angolo destro basso di P1. |
|
La prima immagine parziale fu ripresa da P1 alle 13:12:20.40 da 1863 km. Poi seguirono le prime immagini parziali di P3 (13:12:20.60), P2 (13:12:20.80) e P4 (13:12:21.00). Quindi le quattro telecamere proseguirono nella loro sequenza: ripresa, scansione, invio immagine per un tempo di 0,21’’ e così via... Il trasmettitore della catena raggiunse un valore massimo di 36,7 °C (molto inferiore al limite di 55,5 °C). Come previsto dal programma di bordo, 50’ dopo l'accensione del contatore, alle 13:15:48 il CC&S attivò l'intero sistema video. Questa era una misura di riserva nel caso ci fossero state delle avarie precedenti. Con queste temperature il sistema video poteva funzionare per almeno altri 22 minuti
|
(44) |
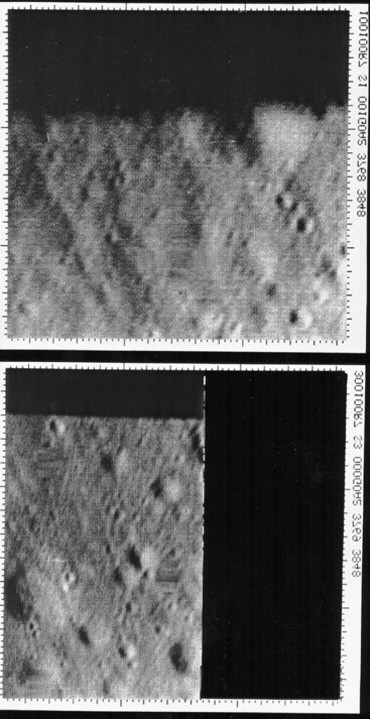 |
|
|
13:25:48.43 — distanza: 1,070 km; telecamera P1 13:25:48.63 — distanza: 0,519 km; telecamera P3 L'ultime immagini parziali riprese prima dello schianto al suolo rispettivamente 0,39’’ e 0,19’’ più tardi. L'immagini sono tagliate perché la loro trasmissione fu interrotta dall'impatto. L'ultimissima foto, quella ripresa da P3, aveva: un'area di 42 x 29 m ed una risoluzione di 50 cm/pixel. |
Alle 13:25:43.75 la telecamera B riprese la sua 200ª immagine, che nei successivi 2,56’’ fu scansionata ed inviata alla stazione DSS-12. Alle 13:25:46 circa la telecamera A riprese un'altra immagine, ma l'invio si perse dopo 350
ms di scansione alla linea 1074 (su 1150). Invece l'invio dell'ultima immagine parziale, a cura della telecamera P3, s'interruppe dopo 400 ms di scansione alla linea 167 (su 300).La catena F aveva operato, dalla prima all'ultima foto, per 17’ e 2’’ [1022 secondi]. Quindi poté riprendere 399 immagini (199 dalla telecamera A e 200 da quella B). La catena P invece funzionò per 13’ e 27’’ [807 secondi] e quindi riprese 4035 foto parziali, una media di 1009 per ogni telecamera P.
| L'IMPATTO |
Dopo aver percorso una traiettoria di 392.140 km (in 68 ore, 35’ e 42’’)
Ranger-7 si schiantò ai 10,35° sud e 21,58° ovest alle 13:25:48.82. Questo valore temporale venne dedotto dalla telemetria del sistema video, ma non si può considerare definitivo. Per stabilire l'attimo esatto in cui fu perso il segnale furono utilizzati due mezzi diversi (nastro magnetico e oscilloscopio). Le stazioni 11 e 12 di Goldstone registrarono un improvvisa interruzione alle 13:25:50. Da approfondite analisi successive DSS-11 indicò come momento dell'impatto le 13:25.50:095 (66 ms in più di DSS-12). Con molta probabilità, omettendo il tempo di transito del segnale dalla Terra alla Luna, l'impatto avvenne alle 13:25:50.029 ± 0,03 secondi.
|
(45) |
|
|
Siti di allunaggio di alcune sonde Usa lanciate fra il 1964 e il 1998.
Al momento dell'impatto la velocità della sonda era di 2,624 km/s (9446,82 km/h). Il punto dell'impatto è a 12,4 km dal luogo previsto dopo la midcourse. Da quello schianto si creò un cratere dal diametro di 14 metri, che verrà poi fotografato dagli astronauti dell'Apollo-16. La zona circostante quel piccolo cratere sarà chiamata Mare Cognitum. Infine un cratere, distante 50 km dal dove si schiantò
Ranger-7, verrà dedicato a Gerald P. Kuiper (direttore scientifico delle missioni Ranger “Block III”) dopo la sua morte avvenuta nel 1973.
|
(46) |
|
|
(47) |
|
|
|
La mappa della zona dove impattò Ranger-7. |
|
|
|
Valutando 4316 foto, i ricercatori furono tutti concordi nel definire la superficie lunare <<con poco rilievo>>. Anche le stime sullo spessore dello strato di regolite erano molto diverse: Kuiper stimava che era 1,5 metri; mentre il geologo californiano Eugene ‘Gene′ Shoemaker (1928-97) diceva che poteva essere anche 15 metri. In definitiva dal punto di vista scientifico l'immagini di
Ranger-7 furono inconcludenti. Ma servirono ai progettisti del programma Apollo per comprendere che non sarebbe stato facile trovare un sito "liscio" per l'allunaggio di una navicella con equipaggio umano. Infine "tracciando" con accuratezza la traiettoria della sonda si poté definire meglio sia la massa terrestre che quella lunare.
RINGRAZIAMENTO:
Vorrei ringraziare l'amico ‘Kappa′ per avermi spalancato gli occhi sulle larghezze di banda nelle trasmissioni televisive. Se non era per lui ne sapevo meno di una spogliarellista (con tutto il rispetto per le spogliarelliste). |
|
FONTI, RIFERIMENTI, LINK DEL MATERIALE UTILIZZATO PER QUESTA SCHEDA |
x FOTO, DISEGNI, SCHEMI, MAPPE, DIAGRAMMA A BLOCCHI, IMMAGINI:
- schema (1): Technical Memorandum No. 33-320, pag. 33 - LINK;
- mappa (2):
LINK;- foto (3):
LINK;- schema (4): LINK;
LINK;- schema (6):
LINK;- diagramma (7): Technical Report 32-719 (
“Tracking System Data Analysis … ”), pag. 18 - LINK [vedi nota];- schema (8):
LINK;- schema (9): Technical Report 32-915 (“Ranger Block III Attitude Control System:
… ”), pag. 15 - LINK [vedi nota];- immagine (10): Technical Report 32-915, pag. 71 - LINK;
- schema (11): Technical Report 32-915, pag. 14 - LINK [vedi
nota];- disegno (12): “THE RANGER VII MISSION”, pag. 27 - LINK;
- diagramma (13): Technical Report 32-719 (“Tracking System Data Analysis … Ranger VII Final Report”), pag. 72 - LINK;
- diagramma (14): Technical Report 32-915, pag. 105 - LINK [vedi
nota];- diagramma (15): Technical Report 32-719, pag. 33 - LINK [vedi
nota];- schema (16): Space Programs Summary No. 37-29, Volume VI, pag. 30 - LINK [vedi
nota];- immagine (17): Technical Report 32-915, pag. 71 - LINK;
- schema (18): Technical Report 32-915, pag. 16 - LINK [vedi
nota];- foto (19):
LINK;- diagramma (20): Technical Report 32-717 (“The Design of the Ranger Television System … ”), pag. 11 - LINK;
- schema (21): “Ranger TV SUBSYSTEM (BLOCK III) FINAL REPORT VOLUME I: SUMMARY”, pag. 51 - LINK;
- schema (22): “Ranger TV SUBSYSTEM (BLOCK III) FINAL REPORT VOLUME I: SUMMARY”, pag. 52 - LINK;
- schema (23): Technical Report 32-719, pag. 9 - LINK;
- schema (24): Technical Report 32-717, pag. 24 - LINK [vedi
nota];- disegno (25): LINK;
- schema (26): LINK;
- schema (27):
LINK;- foto (28):
LINK;- schema (29): Technical Report 32-694 (“Ranger VII Flight Path Its Determination From Tracking Data”), pag. 70 - LINK;
- schema (30): Technical Report 32-694, pag. 71 - LINK;
- schema (31): Technical Report 32-694, pag. 72 - LINK;
- schema (32): Technical Report 32-694, pag. 11 - LINK [vedi
nota];- schema (33): Technical Report 32-694, pag. 11 - LINK èvedi
nota];- schema (34): LINK;
- schema (35): Technical Report 32-694, pag. 79 - LINK;
- schema (36): Technical Report 32-694, pag. 11 - LINK [vedi
nota];- schema (37): Technical Report 32-694, pag. 12 - LINK [vedi
nota];- schema (38): Technical Report 32-694, pag. 11 - LINK [vedi
nota];- schema (39): Technical Report 32-694, pag. 67 - LINK;
- disegno (40): LINK;
- foto (41): LINK;
- foto (42): LINK;
- foto (43): LINK;
- foto (44): LINK;
- mappa (45):
LINK;- mappa (46):
LINK;- foto (47):
LINK.
Nota:
questo schema/diagramma era contenuto in un unico elemento grafico, così ho dovuto ritagliarlo. Per migliorare la comprensione mi sono permesso modificarlo.
x il TESTO:
• National Space Science Data Center,
1961-021A (Ranger-1);• National Space Science Data Center,
1961-032A (Ranger-2);• National Space Science Data Center,
1962-001A (Ranger-3);• National Space Science Data Center,
1962-012A (Ranger-4);• National Space Science Data Center,
1962-055A (Ranger-5);• National Space Science Data Center,
1964-007A (Ranger-6);• National Space Science Data Center,
1964-041A (Ranger-7);• National Space Science Data Center, Image Catalog - LINK;
• Space.40,
1964-041A [nota: il testo è in ceco];• Bernd-leitenberger.de (“Die Ranger mondsonden”), LINK [nota: il testo è in tedesco];
• Deep Space Chronicle, 1961 -
LINK [file pdf];• Deep Space Chronicle, 1962 -
LINK;• Deep Space Chronicle, 1964 -
LINK;• Deepspace.jpl.nasa.gov (“History”
, “1950's”, “Mobile Tracking Station”) - LINK;• Deepspace.jpl.nasa.gov (“History”
, “1960's”, “First spacecraft monitoring station at Cape Canaveral, Florida”) - LINK;• Deepspace.jpl.nasa.gov (“History”
, “1960's”, “Deep Space Network operations control center at … ”) - LINK;• Deepspace.jpl.nasa.gov (“History”
, “1960's”, “Suitcase Telemetry Station, Madagascar”) - LINK;• Deepspace.jpl.nasa.gov (“History”
, “1960's”, “Spacecraft Monitoring Station at Cape Canaveral, Florida”) - LINK;• JPL Technical Memorandum 33-205, (“DISF: GOLDSTONE”), pagg. 5, 9-10, 13-14, 21-22, 24-26, 28; LINK [file pdf · 35,8 MB · 33 pagine];
• JPL Technical Report 32-694, (“Ranger VII Flight Path Its Determination From Tracking Data”), LINK [file pdf · 11,7 MB · 196 pagine];
• JPL Technical Report 32-717, (“The Design of the Ranger Television System to Obtain High-Resolution Photographs of the Lunar Surface”), pagg. 11-14, 21; LINK [file pdf · 1,92 MB · 33 pagine];
• JPL Technical Report 32-719, (“Tracking System Data Analysis Report, Ranger VII Final Report”), pagg. 8-30 - LINK [file pdf · 4,98 MB · 93 pagine];
• Technical Report 32-915 (“Ranger Block III Attitude Control System: Manufacturing, Testing, and Performance”) - LINK [file pdf · 33,7 MB · 116 pagine];
• Astro-electronics, (“Ranger TV SUBSYSTEM (BLOCK III) FINAL REPORT VOLUME I: SUMMARY”), pagg. 45-52 e 55-59; LINK [file pdf · 29,6 MB · 84 pagine];
• Astro-electronics, (“Ranger TV SUBSYSTEM (BLOCK III) … VOLUME V: EVALUTATION”), pagg. 50-89 - LINK [file pdf · 38,7 MB · 148 pagine];
• Nasa, JPL (“RANGER VII: A SPECIAL REPORT”), LINK [file pdf · 1,84 MB · 37 pagine];
• JPL (“THE RANGER VII MISSION”), pagg. 3-22; LINK [file pdf · 27,6 MB · 38 pagine];
• Space Programs Summary No. 37-29, Volume VI, pagg. 6-16 e 21-33; LINK [file pdf · 3,95 MB · 68 pagine];
• Nasa SP-2001-4227 (“Uplink-Downlink, A history of the Deep Space Network 1957-1997”), pagg. 55-60, 68-73; LINK [file pdf · 27,9 MB · 736 pagine];
• Deepspace.jpl.nasa.gov, “
The Deep Space Network celebrates 40 years of service”) - LINK;• Gran Tour! (“Project Red Socks”),
LINK;• Gran Tour! (“Project Able”),
LINK;• Gran Tour! (“Project Vega”),
LINK;• Paolo Ulivi (“L'ESPLORAZIONE DELLA LUNA”, 28.12.2002), pagg. 33-42 e 47-49;
• Sven's space place (“Space Frequency Listing, 700-1600 MHz, Downlink”), LINK;
• Nasa history office (“LUNAR IMPACT - A history of project Ranger”),
LINK;• National Space Science Data Center - Image Catalog,
LINK;• The lunascan project moon shot series (“Ranger-7”),
LINK;• The New York Times, (“On this day: 31 July”),
LINK;• Jet Propulsion Laboratory Technical Report, n. 1489 del 1998 -
LINK;• Saguaro Astronomy Society (“The great Moon race: the commitment”); October 1992 - Issue #189,
LINK;• Saguaro Astronomy Society (“The great Moon race: the commitment, Part 2”); November 1992 - Issue #190,
LINK;• Saguaro Astronomy Society (“The great Moon race: the long road of success”); January 1993 - Issue #192,
LINK.
|
|
ASTRONAUTICA |
|

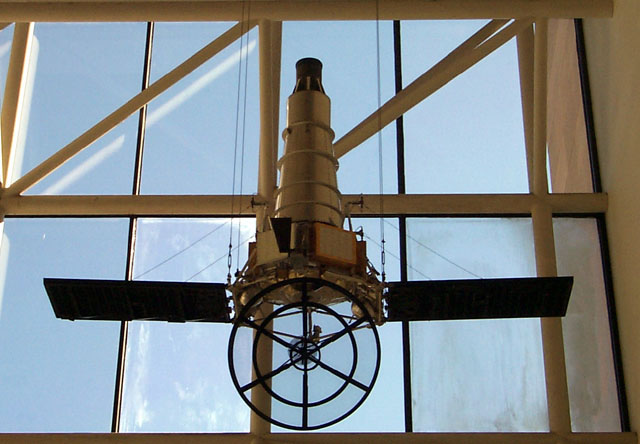
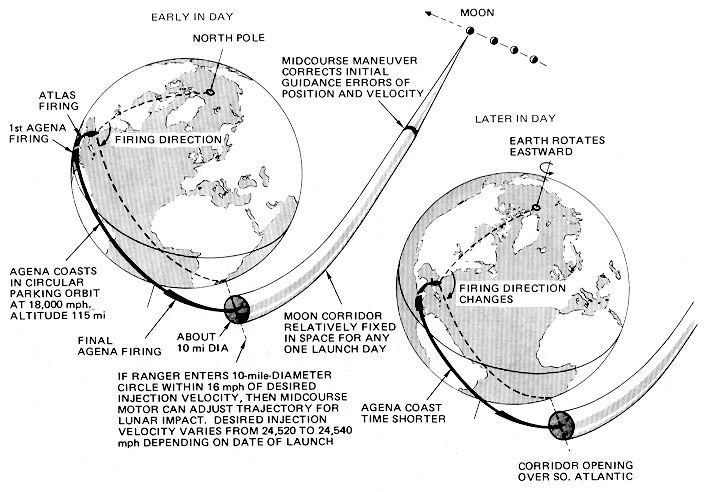
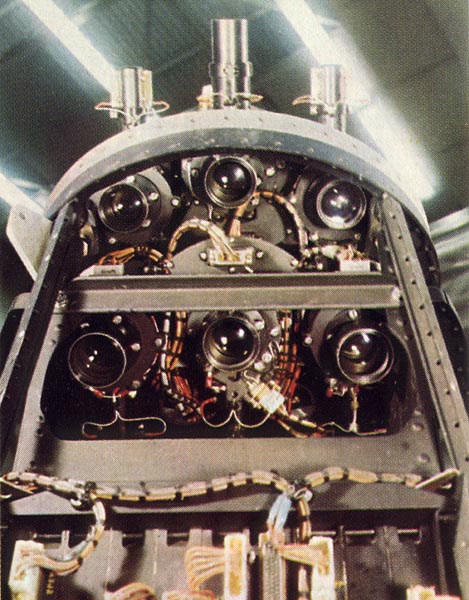
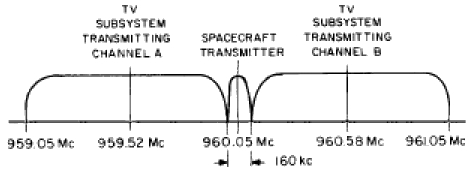
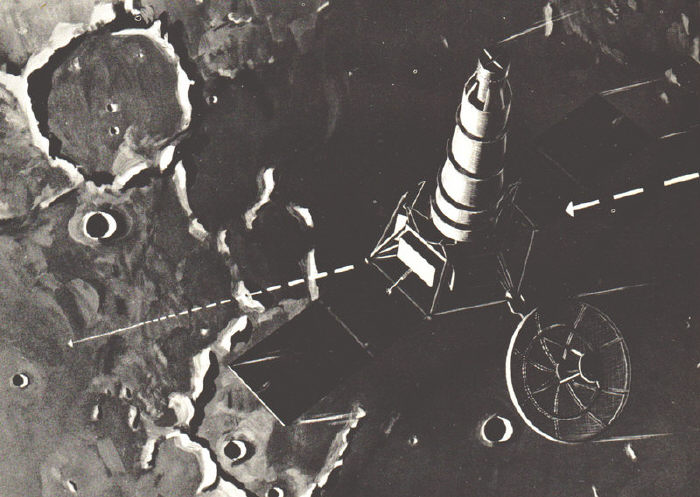
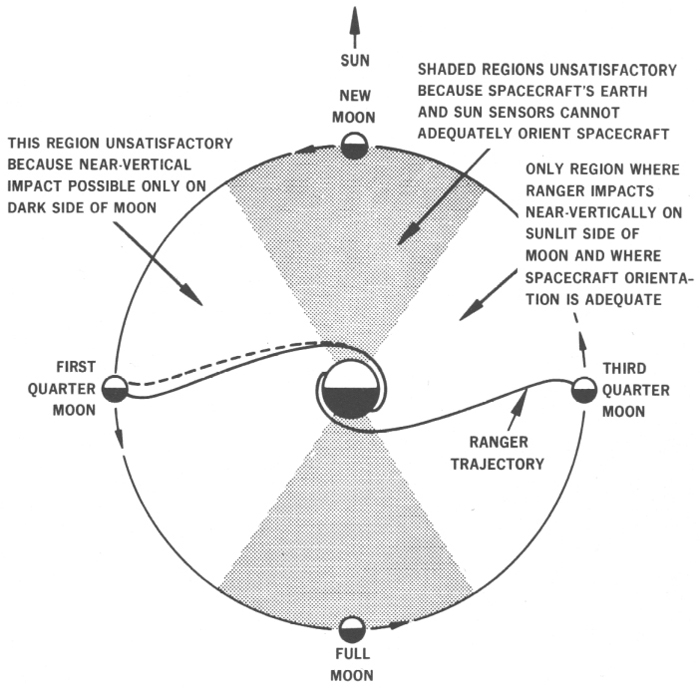

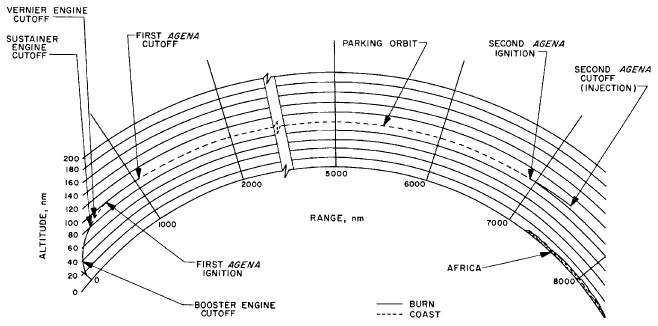
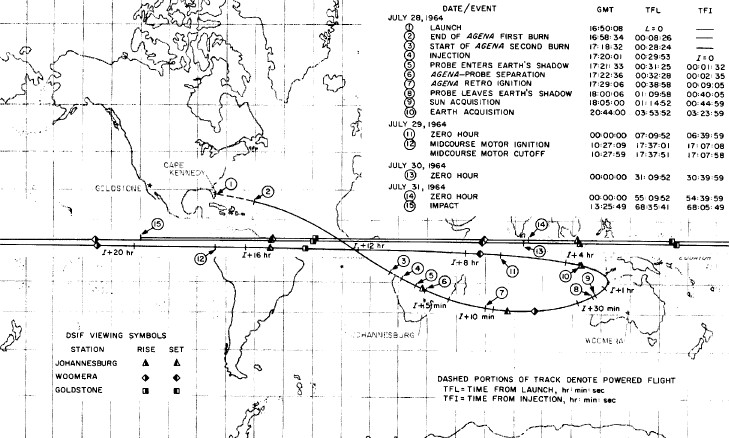
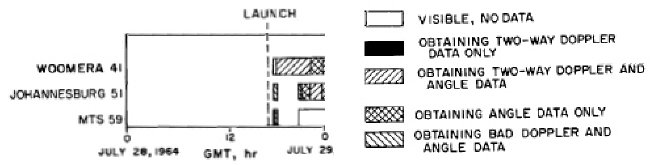
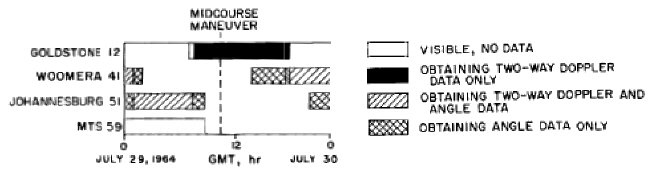
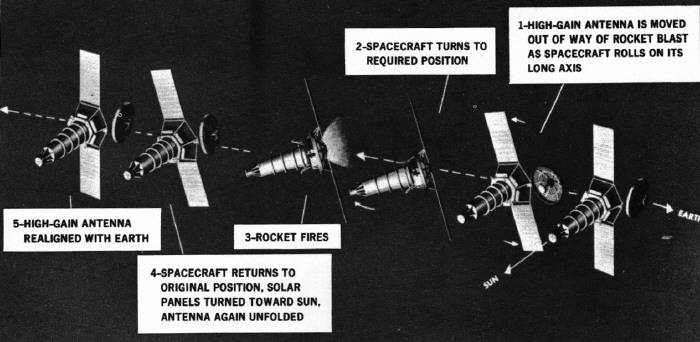
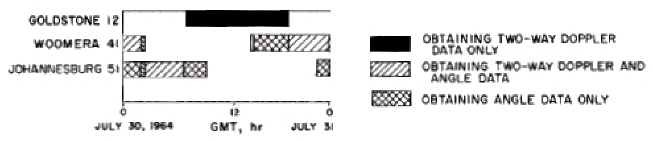
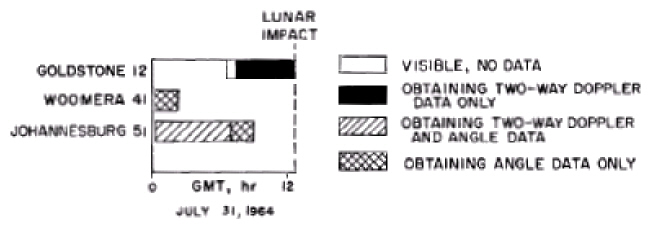
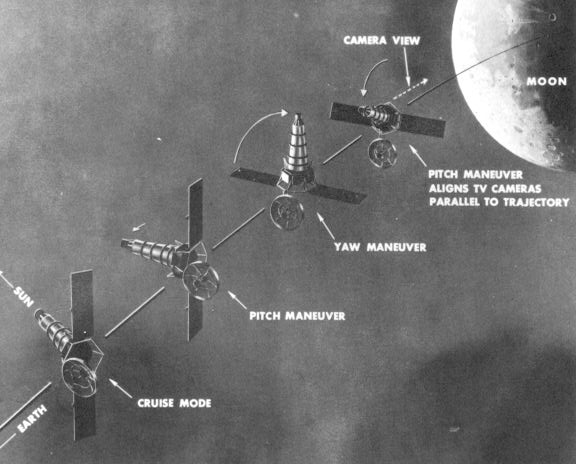


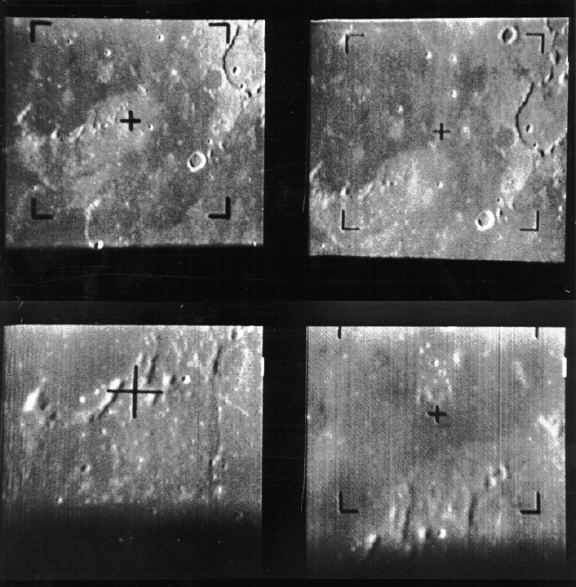
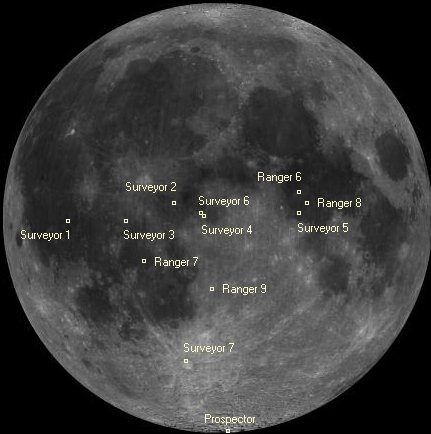

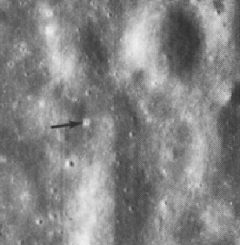
{kind=link}
{kind=link}
{kind=link}
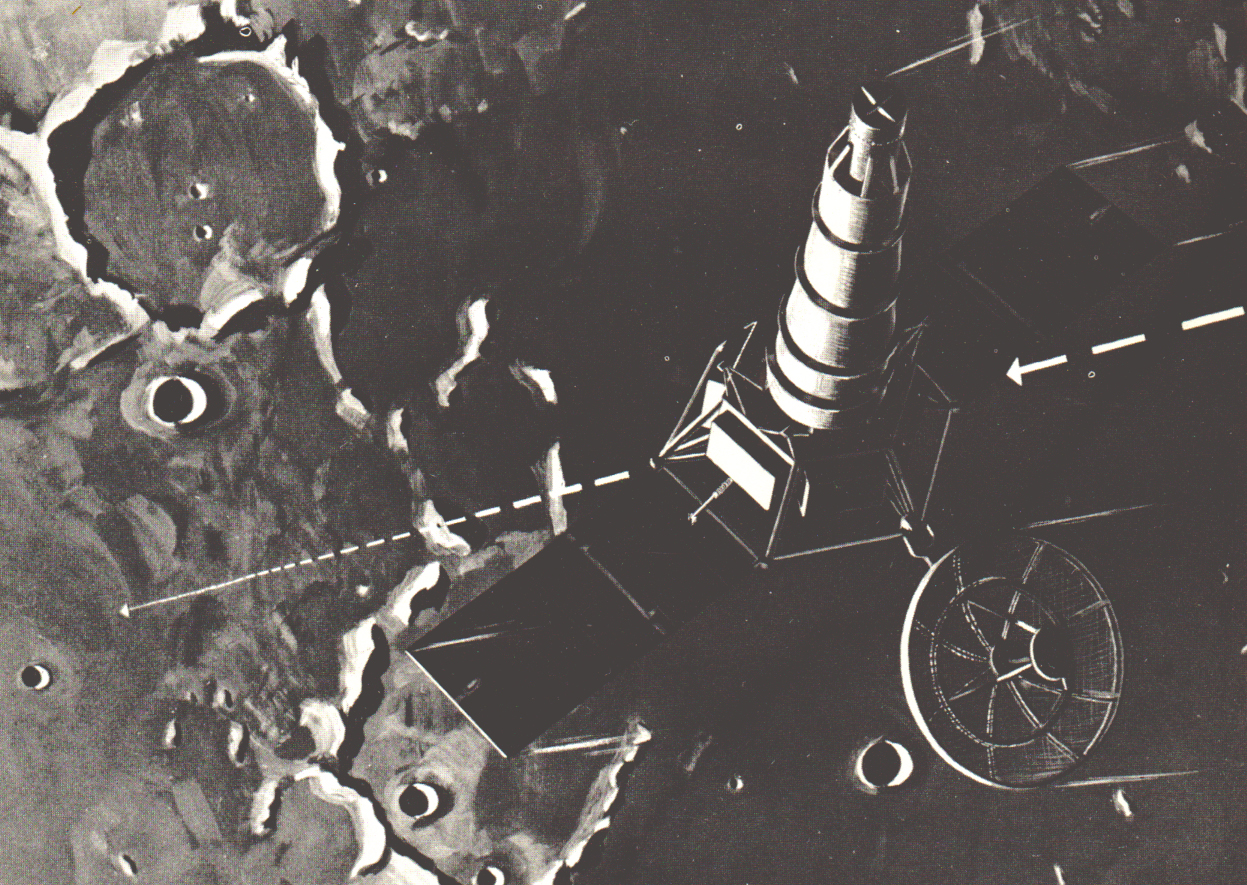{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}