I
C
I
T
E
I
V
O
S
I
M
I
R
P
E
Y
I
K
S
T
E
Y
V
O
S
E
Y
I
V
R
E
Y
P

A
P
P
A
R
A
T
I
V
E
I
C
O
L
I
Luna-17 — Lunokhod-1
In questa missione venne utilizzato, per la prima volta in assoluto, un robot automatico semovente (rover in gergo astronautico) destinato all'esplorazione di un altro corpo celeste, la Luna.
Nella missione americana dell'Apollo 15 venne utilizzato un veicolo semovente ma soltanto come mezzo di locomozione. Infatti era pilotato dagli astronauti americani per spostarsi nella superficie lunare; quindi è improprio definirlo un rover. Solo con la missione marziana Mars Pathfinder del 1997 la Nasa utilizzò un piccolo rover, chiamato Sojourner. La missione ebbe un grande successo, così la Nasa ha programmato un'altra missione marziana (MER) con ben due robot semoventi. Il 10 Giugno 2003 è stata lanciata MER-A con a bordo Spirit, mentre il successivo 8 è decollata MER-B con un rover gemello, Opportunity. I due "robottini" sono poi discesi con successo sulla superficie marziana rispettivamente il 4 e 25 Gennaio 2004.
S P A Z I A L I
K O S M I C H E S K I Y E
(1)
|
I C I T E I V O
S |
E Y I K S T E Y V O S
E P |
|
A P P A R A T I |
V E I C O L I |
|
L U N O K H O D
NASCITA E DEFINIZIONE DELLA MISSIONE “E-8”
Quando Luna-9 allunò il 03.02.1966, l'OKB-1 (Opitnoye Konstruktsioniye Byuro, 'Ufficio di Progettazione Sperimentale') aveva speso più di cinque anni nello sviluppo di un'altra sonda lunare sovietica. Già nei primi anni Sessanta Mikhail K. Tikhonravov (1901-74) — collega di Korolev all'OKB — aveva valutato la possibilità di progettare e creare una stazione di ricerca mobile che potesse viaggiare sulla superficie lunare. Nel 1963 Korolev trasferì lo sviluppo del telaio della sonda all'IKI-100 (Institut Kosmicheski Issledovaniy, 'Istituto di Ricerca Spaziale') di Leningrado.
Ad inizio 1965 gli ingegneri dell'OKB-1 avevano finito il progetto preliminare per un rover “L2”. Ma poi Korolev decise di trasferire tutte le sonde di esplorazione robotica all'NPO (Nauchno Proizvodstvennoye Obyedinyeniye, 'Organizzazione di Produzione Scientifica') creata a suo tempo da Semyon A. Lavochkin (1900-60).
Così dal Maggio 1965 tutta la documentazione sul rover lunare finì sotto la gestione di Georgi N. Babakin (1914-71) che da qualche mese dirigeva anche l'NPO Lavochkin. Babakin e Kemurdzhian ripartirono da un progetto schematico ed il rover fu denominato “E-8”. L'immagini e l'informazioni dalla superficie lunare raccolte da Luna-9 fecero apportare delle importanti modifiche. Infatti la solidità del suolo, come la finezza dello strato di polvere, convinsero i progettisti che per i movimenti servivano otto ruote e non un cingolato. Babakin firmò lo schema di progetto del cosiddetto “E-8” a fine 1966; in seguito fu ampliata la definizione delle “E-8”, che divennero navicelle lunari di terza generazione.
Queste avevano uno stadio inferiore ed un modulo inferiore comune (denominato KT - Korrektirujushhe-Tormoznogo, 'Correzione-Frenaggio'). Poi a seconda della missione ci sarebbero stati tre diversi stadi superiori strumentali. In particolare, la versione “E-8” avrebbe portato un rover (denominato “8EL”) per fotografare ed esplorare la superficie lunare. La versione “E-8LS” avrebbe liberato un orbiter capace di studiare l'ambiente lunare e riprendere immagini della superficie. Infine la versione “E-8-5” sarebbe atterrata sulla Luna, avrebbe raccolto un campione di suolo lunare per poi riportarlo sulla Terra (missione di sample return in gergo astronautico). Solo a fine 1967 tutta la documentazione del progetto “E-8” fu terminata e poté iniziare la costruzione dei modelli. Il via libera definitivo a queste nuove sonde lunari venne dato dal Consiglio dei ministri l'8 Gennaio 1969.
I CENTRI DI CONTROLLO E GESTIONE DELLA MISSIONE
Probabilmente le stazioni di "tracciamento" utilizzate per guidare la navicella verso la Luna e nel suo sbarco sulla superficie erano le stesse di Luna-16. Comunque il rover veniva radio-telecomandato solo dal "centro di coordinamento e calcolo" posto nella città di Simferopoli in Crimea. La fonte [LINK] che invece la pone a Zvezdonoy Gorodok non è quindi corretta. Infatti questa località, <<Città delle stelle>> alla lettera, era/è la "Houston sovietica/russa". Lì si addestravano i cosmonauti come Gagarin e attualmente vengono addestrati i suoi colleghi per l'ISS (International Space Station, la Stazione Spaziale Internazionale).
TENTATIVO PER LA MISSIONE “E-8”
1969 - Alle 06:48:15 del 19 Febbraio decollò una navicella versione “E-8” sospinta da un vettore Proton K/D. Dopo 11 secondi di volo la struttura del vettore cedette alle vibrazioni distruggendo la navicella. Alle 06:48:56, a T + 51", i controllori furono costretti nell'inviare il comando dell'autodistruzione. I resti del razzo e della navicella ricaddero a 14,5 km dal cosmodromo. Le minuziose ricerche non riuscirono a recuperare le pastiglie agli isotopi di polonio-210 destinate al riscaldamento interno del rover. Secondo voci non confermate, alcuni soldati di leva — sopraggiunti sul luogo prima delle squadre di recupero — avrebbero usato le pastiglie radioattive per riscaldare la loro camerata! Questo oggetto lanciato dai sovietici venne classificato dall'U.S.N.C.S. (U.S. Naval Command Satellite) come Luna-1969A.
Con l'ennesimo fallimento nel lancio di un “Proton K-D” l'ente responsabile revisionò e verificò il loro rendimento. In ben 19 lanci si registrarono appena cinque "successi" (leggi uscita dall'orbita terrestre): Zond-4, 5, 6, 7 e Luna-15. Alle 03:45 dell'08.08.1970 un “Proton 8K82K”, quindi senza il Blocco D, completò un volo suborbitale diagnostico per verificare le modifiche apportate. A bordo del razzo fu posto un carico molto pesante (denominato “GVM 82EV”) per simulare la presenza di un carico scientifico. Il volo andò alla perfezione; così le sonde “E-8” avevano un vettore più affidabile e comunque capace di portare 5170 kg sulla Luna.
Una “E-8-5” era divisa in due moduli: quello inferiore di viaggio e discesa (lander in gergo astronautico) e quello strumentale.
MODULO DI VIAGGIO E DISCESA (KT)
|
(2) |
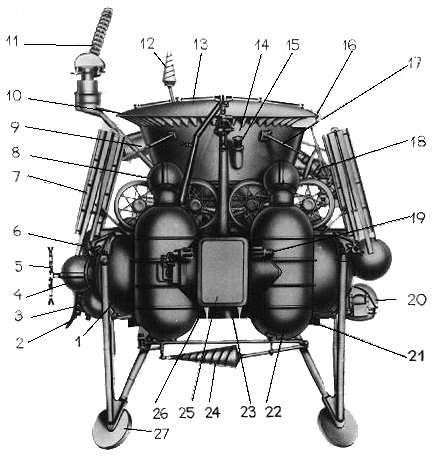 |
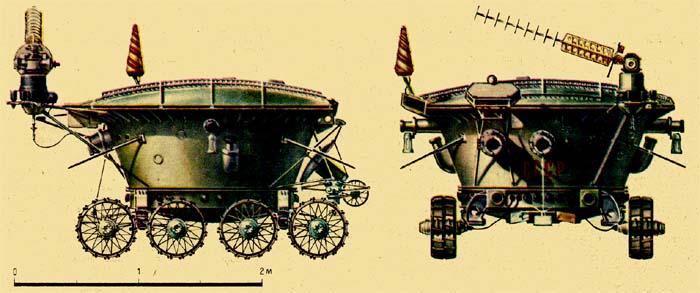
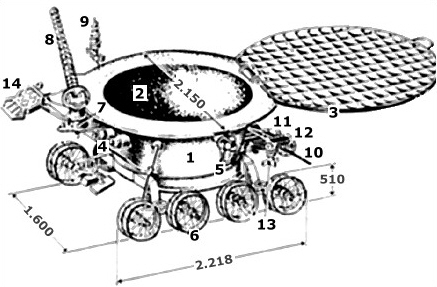
1. modulo dei serbatoi dei propellenti 2. altimetro radio 3. bombola contenente l'elio pressurizzante 4. bombola elio del sistema propulsivo automatico 5. propulsore a bassa spinta 6. sistema di stabilizzazione serbatoi propellenti 7. rampa per la discesa del rover 8. bombola d'azoto del sistema di controllo assetto 9. telecamera frontale (rover) 10. antenna di guida (rover) 11. antenna ad alto guadagno (rover) 12. antenna conica elicoidale (rover) 13. pannelli solari (rover) 14. Lunokhod-1 (il rover) 15. telefotometro laterale (rover) 16. cerniera del tappo per i pannelli solari (rover) 17. antenne a stilo (rover) 18. generatore di calore ad isotopi (rover) 19. sistema di controllo del "motore" a bassa spinta 20. esperimento Doppler 21. ugello controllabile del "motore" 22. modulo separabile 23. ugello del "motore" 24. antenna conica elicoidale 25. compartimento strumentale 26. ugello del "motore" a bassa spinta 27. carrello d'atterraggio |
Era praticamente identico a quello usato per Luna-16; pesava "a secco" 1088,6 kg ed imbarcava ben 3900,9 kg di propellenti (dimetilidrazina non simmetrica e acido citrico; ossidante: tetrossido d'azoto). La differenza più rilevante fra i due KT era la presenza di una piattaforma, sopra la sezione centrale, dove stava il rover. In più questo KT includeva due rampe distinte. Queste potevano essere abbassate da entrambi i lati in maniera che il robot potesse discendere sulla superficie.
MODULO STRUMENTALE
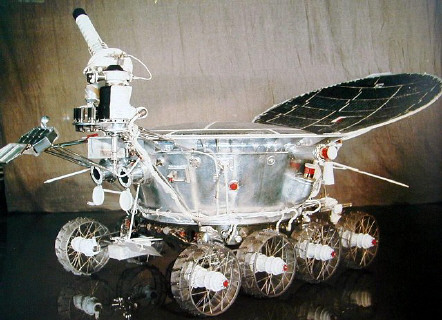
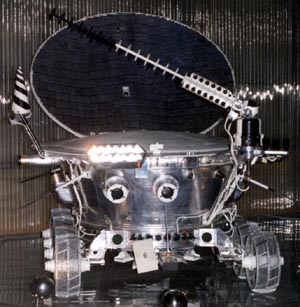
Il rover — poi battezzato Луноход I (Lunokhod-1, <<Primo camminatore lunare>>) — aveva una struttura centrale vagamente cilindrica. Le sue misure in [cm] erano: 134,6 di altezza dal suolo (ma contando l'antenne arrivava a 154); 215,9 di diametro massimo (in corrispondenza dell'apice del compartimento); 160 cm di profondità (a livello delle ruote). Il peso del veicolo spaziale si attestava sui 755,43 kg.
Sotto il "corpo centrale" c'erano quattro coppie di ruote leggere e flessibili. Ognuna di queste aveva un diametro di 50,8 cm. La traccia del veicolo era di 160 x 221,8 cm (larghezza x lunghezza). Ogni ruota era composta da tre cerchioni in titanio, con una griglia di acciaio inossidabile come borchia. Ognuna aveva delle sospensioni indipendenti e due motori in corrente continua sui mozzi. In questo modo una ruota poteva viaggiare in avanti a due velocità: 0,8 km/h (13,3 m/minuto cioè 22,2 cm/s) oppure 2 km/h (33,3 m/minuto cioè 55,5 cm/s). La prima velocità si poteva tenere per un massimo di 50 secondi, mentre la seconda velocità per non più di 9 secondi. La velocità nominale sulla superficie lunare era stimata in 100-200 metri il giorno.
Per ruotare il veicolo bisognava mandare avanti le ruote di un lato, mentre quelle dell'altro lato dovevano essere ferme o in retromarcia. Praticamente il rover "sterzava" come lo stesso principio dei carri armati. La velocità di retromarcia per ogni ruota invece era fissa. Ogni ruota aveva una piccola carica esplosiva che poteva dietro comando da terra poteva spezzare l'albero. In questo modo, se un motore si fosse guastato la sua ruota poteva girare liberamente. Con due ruote per lato la missione poteva proseguire. Inoltre ogni ruota era dotata di un freno a disco per bloccare il veicolo durante le lunghe soste notturne. Infine c'era anche una nona ruota più piccola, non motrice, libera di ruotare posta nella parte posteriore del veicolo. Questa ruota "speciale" funzionava da odometro: cioè misurava la distanza percorsa.
|
(3) |
|
|
La parte cilindrica del rover era realizzata in fibra di magnesio e veniva pressurizzata con azoto ad un'atmosfera. L'alloggiamento interno conteneva: l'unità per il controllo remoto, il ricevitore/trasmettitore, il sistema di controllo termico e i due sistemi televisivi. La temperatura interna era mantenuta fra i 0 e 40 °C grazie ad uno scambiatore di calore che utilizzava vapore acqueo. Il riscaldamento veniva espletato da una piccola pila atomica. Questo dispositivo sfruttava il decadimento radioattivo di 11 kg di polonio 210 per produrre calore. Con questi 350-660 Watt supplementari si impediva il congelamento degli strumenti interni. Il tempo di dimezzamento del polonio 210 è di 138 giorni, quindi entro un anno la quantità di calore emesso si sarebbe ridotta di circa 7/8.
L'energia solare era raccolta da pannelli posti sul retro dell'ampio coperchio convesso. Il chilowatt d'energia raccolta serviva a ricaricare le batterie chimiche interne. La copertura convessa (Ø 2,16 metri) era incernierata sul struttura, così poteva fare un qualsiasi movimento fra: "chiuso" (0° d'angolo) o "aperto" (180°). In questo modo era possibile sfruttare al massimo i raggi solari anche con angolazioni sfavorevoli. Il doppio (cioè ridondante) sistema planimetrico ad aria si disfaceva del calore attraverso un compartimento strumentale, posto vicino ai pannelli solari. Durante il giorno lunare la copertura veniva tenuta sempre alzata, così il radiatore sottostante avrebbe mantenuto un'adeguata temperatura interna. Invece quando arrivava la notte lunare, dove la temperatura poteva scendere fino a -150 °C, il coperchio veniva abbassato per evitare che il calore interno si disperdesse. Per aggiungere altro gas raffreddante si poteva utilizzare anche un evaporatore ad acqua.
|
(4) |
|
|
Le dimensioni principali in mm
Dal telaio (84 kg di peso) spuntavano tre antenne: quella ad alto guadagno a forma di spirale, quella omnidirezionale di riserva conica-elicoidale ed infine l'antenna per la guida dalla stazione terrestre. Per ottenere dati dai movimenti del rover venivano utilizzati dei giroscopi interni.
Il sistema di riprese televisive era distinto in due gruppi:
1. due telecamere TV poste sul davanti;
2. due telefotometri posti su entrambi i lati.
Le telecamere "frontali" fornivano una vista stereoscopica (ampia 50°) automaticamente ogni 21,1 secondi. Inoltre ogni telecamera era dotata di un otturatore per fare delle esposizioni da 1/25 di secondo. In questo modo veniva ridotto al minimo l'"imbrattamento" dell'immagini dovuto al movimento del rover sulla non lineare superficie lunare. L'immagini venivano trasmesse a Terra attraverso l'antenna conica omnidirezionale. Dato che le due telecamere fornivano panorami verticali da 500 x 3000 pixel, serviva tempo per ottenere a terra la completa immagine. Questo aspetto tecnico e l'inevitabile ritardo — di sei secondi — fra un comando e la sua esecuzione rendevano difficile la guida. Per un'ulteriore sicurezza c'erano dei sensori collegati ad un sistema automatico. Questo dispositivo avrebbe bloccato il robot ogni volta che superava i 27° di pendenza in modo da evitare il ribaltamento.
Come già detto, sul lato destro e sinistro del rover c'era un telefotometro simile a quello usato per Luna-9. Quello sul lato destro puntava il retro e il terreno solcato dalle ruote. Mentre il telefotometro sul lato sinistro, puntava lontano verso l'esterno. I due telefotometri stavano inclinati rispetto all'asse orizzontale di 15°. Il campo visivo delle telecamere di guida era 30° in orizzontale e 360° in verticale. In questo modo potevano essere riprese immagini del cielo e quindi le posizioni delle stelle. Invece i telefotometri avevano un campo visivo di 180° orizzontali e 15° verticali. Questi potevano riprendere immagini dalla distanza di 1,4 metri fino all'orizzonte. La velocità di scansione dei fotomultimetri era di 4 linee al secondo. Si generava così un segnale video analogico alla frequenza di 1000 Hz, che utilizzava le sub-portanti da 130 e 190 kHz. Per inviare l'immagini raccolte dai fotomultimetri veniva usata l'antenna ad alto guadagno orientabile. L'invio di una panorama da 360° (composto da 500 righe x 6000 colonne) necessita di vari minuti sempre mantenendo un perfetto allineamento dell'HGA con la Terra. Quando si dovevano inviare immagini ad alta qualità, il rover doveva per forza rimanere fermo. Le frequenze di trasmissione/ricezione erano probabilmente le stesse del KT.
|
(5) |
|
|
(6) |
|
|
|
|
1. compartimento ermetico 2. radiatore 3. pannelli solari 4. telecamera per la guida 5. telefotometro panoramico 6. sospensione 7. sistema di orientamento per l'HGA |
8. antenna ad alto guadagno direzionale (HGA) 9. antenna a basso guadagno (di riserva) 10. antenna per inviare i dati del RIFMA 11. generatore d'energia ad isotopi 12. odometro 13. penetrometro (PrOP) 14. riflettore laser (TL) |
|
STRUMENTAZIONE SCIENTIFICA:
1. spettrometro (RIFMA: Roentgen Isotopic Fluorescent Method of Analysis, 'Sistema Analisi Isotopica a Fluorescenza-X');
2. rilevatore di raggi cosmici (denominato “RV-2N”);
3. fotometro per i raggi X ;
4. esperimento laser (TL: Télémetrie Laser, Telemetria Laser - peso: 3,67 kg);
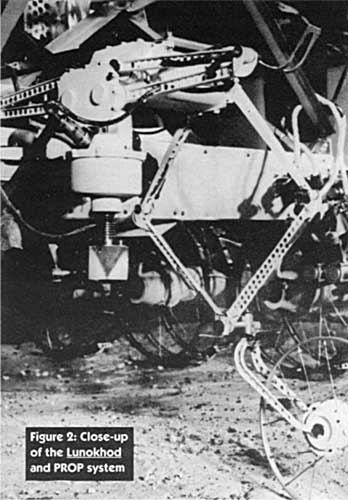
5. penetrometro (PrOP: Pribori Ochenki Prokhodimosti, 'Strumento per la Valutazione della Tenuta di Strada'.
|
esperimento 1 |
lo scopo di questo strumento era determinare: la composizione chimica del suolo ; la natura delle rocce ; le condizioni fisiche esistenti sulla superficie. Lo strumento, posto nel rover, si poteva dividere in: una sporgenza esterna con pannello, le fonti energetiche agli isotopi (poste all'esterno del compartimento pressurizzato), delle unità elettroniche, un convertitore analogico-digitale ed un complesso radio. La sporgenza esterna era ad un'altezza di circa 3 cm dal suolo. La posizione dei rilevatori era tale che poteva registrare la radiazione fluorescente in un'area del suolo a forma di ellisse (asse maggiore [m]: 1,2 ; asse minore: 0,8). Le fonti agli isotopi garantivano un'"attività" di 900 Curie. I rilevatori della radiazione fluorescente erano dieci contatori proporzionali (diametro: 80 mm; lunghezza 80 mm). Questi rilevatori erano disposti su due file, cinque per ognuna. Ogni contatore era riempito con una miscela (90% argon e 10% metano) ad pressione di 1 atmosfera. Lo strumento poteva rilevare elementi dall'alluminio al ferro. La temperatura di funzionamento era compresa nell'intervallo da -70 a +90 °C. Le soglie minime rilevabili erano: 1-2% (per alluminio, potassio, calcio) e 0,5% (per il ferro). Infine la precisione di ogni misurazione si attestava sul 10-15%. I dati dello strumento venivano codificati in forma binaria. Poi erano inviati su un canale radio che utilizzava un'apposita antenna "a filo" posteriore. |
|
esperimento 2 |
era un telescopio che misurava dal cielo lunare i protoni e le particelle alfa viaggianti nello spazio interplanetario. Lo strumento si componeva di tre sensori: un contatore di "scarica" a gas D1 (della serie “STS-5”, la stessa usata per Luna-1 e la maggior parte delle sonde Venera); due rilevatori D2, D3 (spessore: 35 mm). D1 avrebbe monitorato: 1. i protoni con un'energia maggiore di 30 MeV; 2. gli elettroni un'energia minima di 2 MeV. In ogni caso le particelle dovevano arrivare perpendicolarmente alla superficie lunare. D2 invece avrebbe rilevato i protoni provenienti dallo Zenit lunare nell'intervallo energetico 1-5 MeV. Infine D3 era rivolto alle particelle alfa, provenienti dallo Zenit lunare, comprese nell'intervallo energetico 4-8 MeV. Una memoria interna sarebbe stata usata per i dati raccolti. La risoluzione temporale era di almeno un'ora al giorno. Tutti i tre sensori misuravano il "flusso" di particelle in maniera continua. |
|
esperimento 3 |
era un telescopio che osservando il cielo della Luna avrebbe rilevato l'irradiazioni intorno al veicolo per una durata massima di sei ore alla volta. |
|
esperimento 4 |
era un riflettore che permetteva agli scienziati sovietici e francesi di fare degli esperimenti d'allineamento e altre misurazioni. Infatti il dispositivo (diametro: 10,2 cm) rifletteva sulla Terra un raggio laser inviato da una stazione francese o sovietica. In questo modo si poteva determinare la distanza Terra-Luna con una precisione di 20-30 cm. |
||
|
(7)
|
Vista dal davanti dove spicca un riflettore |
|
|
|
L'esperimento era costituito da quattro piccoli riflettori, ciascuno di questi era lungo 11 cm e si componeva da 14 prismi di vetro. L'intero dispositivo scientifico aveva una lunghezza di 44 cm ed una larghezza di 19 cm. |
|||
|
esperimento 5 |
era un cuneo metallico lungo 4 cm al quale erano unite quattro alette. Il dispositivo era posto sul retro del rover, accanto alla nona ruota (l'odometro, il misuratore della distanza percorsa). |
||
|
(8) |
|
|
|
|
Lo scopo di questo strumento era effettuare due tipi diversi di misura della forza. Il primo tipo era quello di misurare la forza necessaria per far affondare il cuneo nel terreno. Il secondo tipo era quello di misurare la forza necessaria per penetrare nel terreno, le alette invece misuravano la coppia necessaria per fare ruotare il cuneo nel terreno. |
|||
|
(9) |
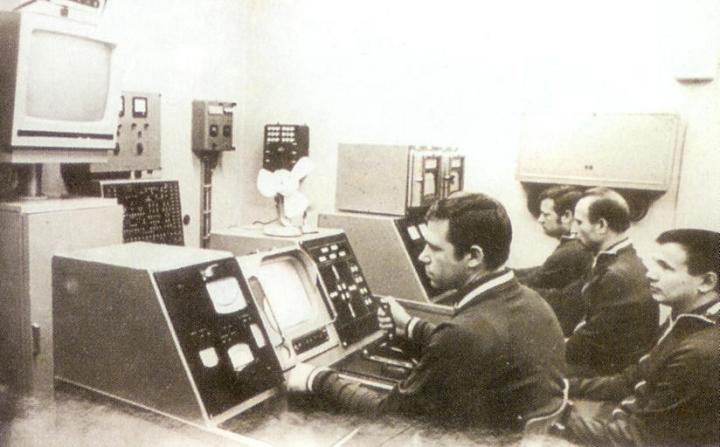 |
Il rover era guidato via radio dal "Centro di Coordinamento e Calcolo" posto nella città di Simferopoli. Ogni giorno terrestre Lunokhod-1 era seguito per 4-6 ore, cioè il tempo in cui l'antenne di Yevpatoriya potevano "vedere" il rover. Due "equipaggi" di controllori si alternavano ogni tre ore circa. Dagli schermi televisivi del centro di controllo si sarebbero viste le riprese dalla superficie lunare.
|
(10) |
|
|
|
(11) |
|
|
Il centro di controllo |
|
Un operatore alla console |
|
Ciascun gruppo era composto da cinque persone: comandante, guidatore, navigatore, ingegnere, operatore delegato alle comunicazioni con l'antenna ad alto guadagno del rover. In ogni caso c'era di riserva un altro controllore capace di sostituire ognuno dei cinque. La vita operativa del veicolo semovente era stimata in almeno tre giorni lunari (circa 84 giorni terrestri), Ma potenzialmente la missione poteva durare molto di più.

Lancio di un vettore Proton (sicuramente non Luna-17)
Alle 14:44:01 (T) del 10 Novembre 1970, una carico scientifico “E-8” fu lanciato usando un quattro stadi Proton 8K82K. Il programma di volo del vettore era il seguente: accensione primo stadio (T + 2:05) per 75"; distacco ; accensione secondo stadio (T + 6:15); distacco del terzo stadio (T + 9:48). Alle 15:00 circa (T+15:58) il vettore si pose in una temporanea orbita di parcheggio terrestre (187 x 205 km ; 88,4’; 51,6°). Alle 15:49 l'ultimo stadio bruciò per 400" ed impresse una velocità che permetteva di imboccare una traiettoria verso la Luna. Dopo 12" lo stadio di fuga (Blocco D) si staccò dalla sonda, che assunse la denominazione di Luna-17. Alle 19:41:21 il contatore dei raggi cosmici iniziò la sua attività scientifica.
Il 12, a 223.000 km dalla Terra, venne effettuata la prima manovra di correzione della traiettoria. Alle 23:45 del 14, a 356.000 km, fu attuata anche la seconda ed ultima manovra di correzione della traiettoria. Alle 23:45 del 15 Luna-17 si collocò in un'orbita lunare (85,3 x 141 km | 116’ | 141°). La massa della sonda si era così ridotta a 4100 kg.
- 17 Novembre 1970 -
| Sbarco di un rover sulla Luna |
| 1° giorno lunare: 17-24 Novembre |
Dopo aver percorso 28 orbite, la navicella iniziò le procedure di discesa. Alle 03:36 circa, un'accensione del KTDU permise di imboccare un'orbita inferiore (19,3 x 85,3 km | 114’ | 141°). Alle 03:41:05 vennero sganciati i moduli eiettabili ormai inutili. Alle 03:41:13.8, ai 22 km di quota e alla velocità orbitale di 6091 km/h, il retrorazzo principale fu acceso per 267". Così la velocità orbitale "orizzontale" si sarebbe azzerata.
|
(13) |
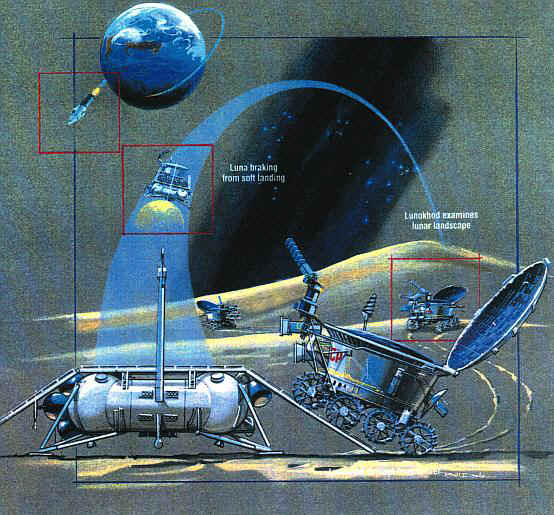 |
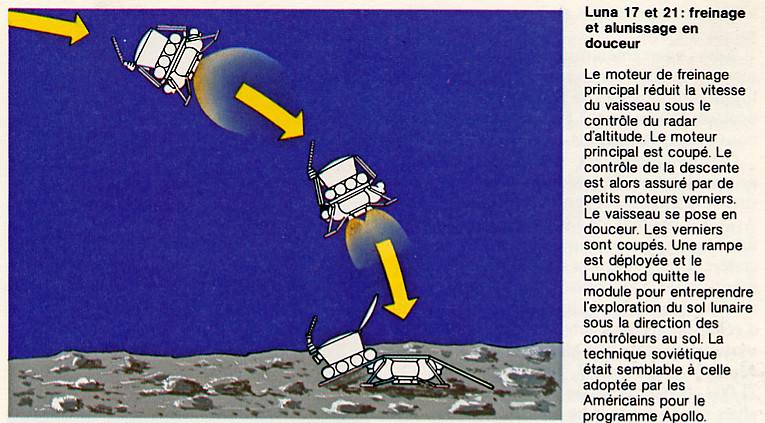
Disegno esemplificativo della missione
|
(14) |
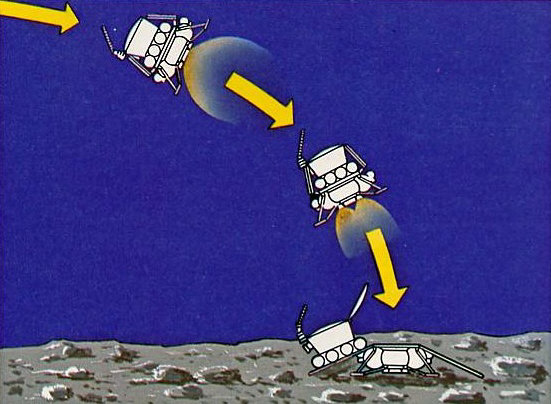 |
Disegno rappresentante l'ultima fase della discesa di una navicella “E-8”
Valutando i valori forniti dal tachimetro e dall'altimetro radar, ad una quota di 550 ± 200 metri, furono accesi i motori a bassa spinta. A 10-30 metri dal superficie, l'ordinatore di bordo spense gradualmente il KTDU per garantire una discesa lenta e costante. Infatti il KT era progettato per resistere ad un impatto al suolo non superiore ai 5 m/s (18 km/h).
Alle 03:46:50 Luna-17 toccò la superficie selenica alle coordinate 38°17’ nord, 35°00’ ovest. La velocità all'"impatto" fu di 3,5 m/s (12,6 km/h). Il veicolo spaziale si posò inclinato di 4° in un cratere profondo 7 metri e dal diametro superiore ai 150 metri. Il sito di allunaggio è nel Mare delle Piogge (Mare Imbrium in latino) vicino al Golfo degli Arcobaleni (Sinus Iridum) a circa 2500 km da dove scese Luna-16. Al suolo l'intera navicella — lander + rover — pesava 1814 kg; ricordo che al lancio sulla Terra era di 5600 kg.
|
(15) |
|
Siti di allunaggio delle sonde Luna lanciate fra il 1959 e il 1976
|
(16) |
|
|
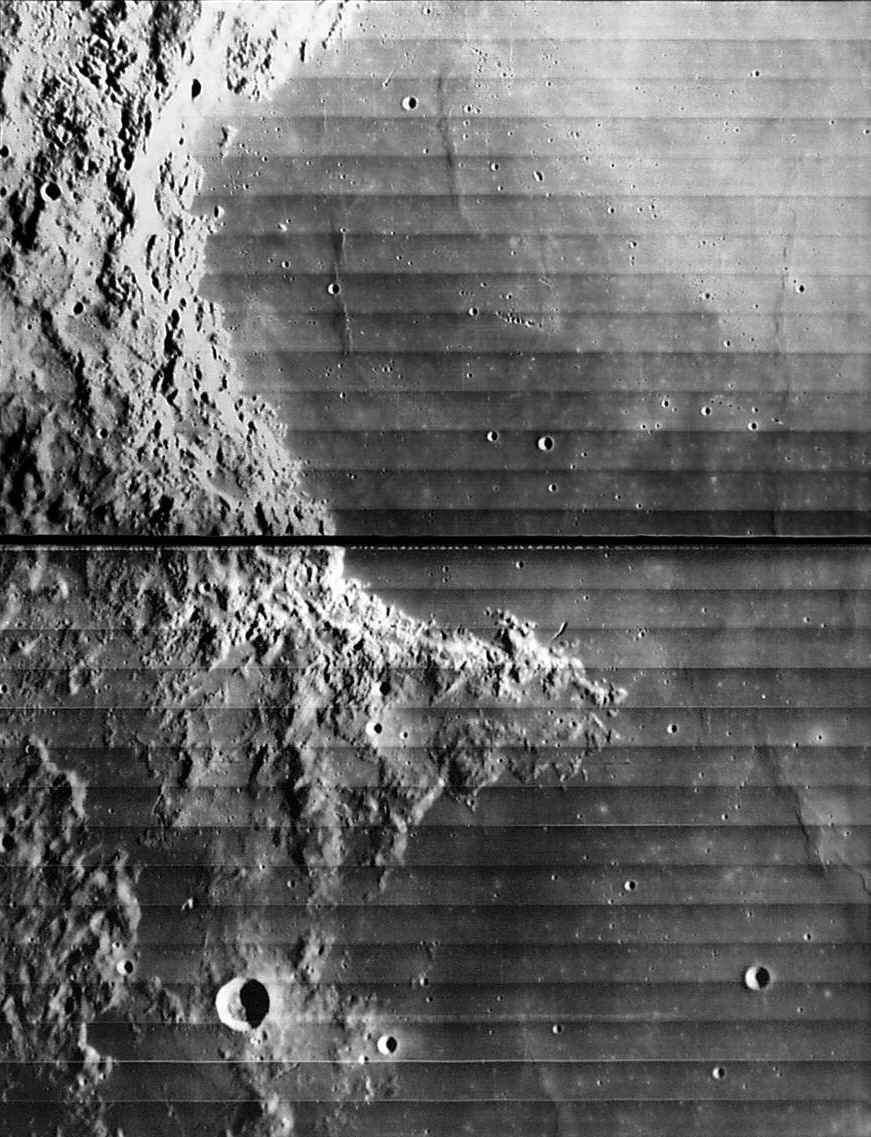
(17) |
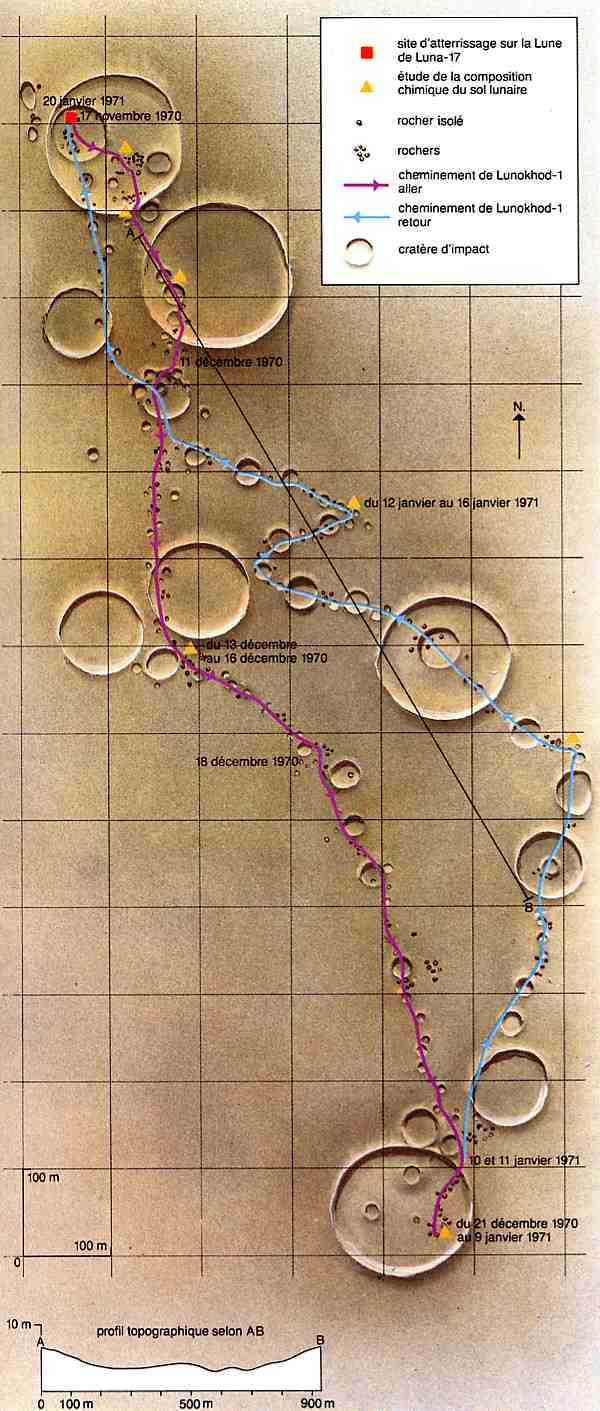
Una mappa del luogo in cui prima allunò e poi si spostò Lunokhod-1; a destra un'immagine della medesima zona
Alle 04:20 vennero stabiliti i collegamenti radio con il rover (che era ancora posizionato sopra il lander). Per verificare le condizioni del terreno circostante alle 05:31 venne azionata solo una delle due telecamere frontali. Le immagini apparivano ben definite senza penombre.
|
(18) |
|
|
Costatato che non c'era nessun ostacolo intorno, vennero estese le rampe di discesa. Lunokhod-1 discese piano piano dalla rampa più illuminata e alle 06:28 calcò il suolo lunare. Il veicolo semovente fece circa 20 metri e controllò lo stato del modulo di discesa, che era atterrato a 15 metri dal bordo di un cratere.
|
(19) |
|
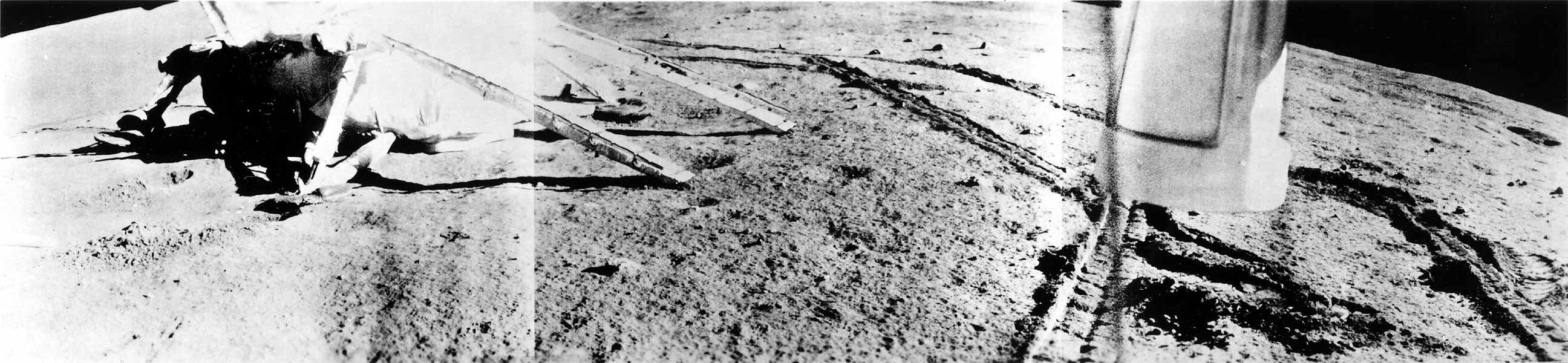
|
Un'immagine ripresa dal telefotometro sul lato destro dove si vede il lander ormai abbandonato
|
(20) |
|
|
19.11.1971 - Un'immagine panoramica dove si nota il percorso fatto dal rover nei primi due giorni terrestri sulla Luna (lato sinistro)
Il 19 Novembre (2° giorno terrestre) venne dedicato al caricamento delle batterie. Il 20 Novembre (3° giorno ter.) il rover percorse 90 metri. Il quarto giorno ne percorse altri 100 scalando un piccolo dosso con una pendenza di 10°. Il 22 Novembre in attesa della prima notte lunare, Lunokhod-1 venne parcheggiato a circa 200 metri dal lander. Il coperchio di protezione fu così chiuso, mentre il generatore di calore al polonio 210 manteneva "vivo" il robot durante la gelida notte. Nel primo giorno lunare, il robot percorse 197 metri a marcia ridotta. Inoltre completò dieci sessioni radio, riprese 14 immagini ravvicinate, inviò 12 viste panoramiche e condusse delle analisi sul suolo.
| 2° giorno: 8-23 Dicembre |
Il 5 Dicembre fu eseguito il primo esperimento per determinare con precisione la distanza Terra-Luna. L'osservatorio “Pic de Midi” nei Pirenei inviò un raggio laser al riflettore a bordo del rover. Lo stesso esperimento venne replicato il 6 Dicembre; questa volta però il raggio laser fu inviato dall'osservatorio Sirmesis in Crimea (URSS). Solo in queste due occasioni il riflettometro laser funzionò regolarmente, poi le misure fornite divennero intelligibili. Non si sa con precisione cosa abbia reso inutilizzabile il riflettometro. Forse si contaminò con della polvere oppure la protezione dello strumento non si era aperta come previsto. L'8 Dicembre, con l'alba locale, iniziò il secondo giorno lunare. Il coperchio protettivo venne alzato per ricaricare le batterie. Il 10 Dicembre iniziarono l'attività scientifiche, il rover si spinse lontano dal modulo di discesa. In un giorno terrestre percorse ben 300 metri. Un altro giorno salì su una collinetta che aveva una pendenza di 23°. Qualche giorno dopo il sistema automatico di controllo bloccò una "scalata". Infatti si era raggiunta la pendenza limite di 27°.
Il 13 Dicembre il sensore D2 dello strumento “RV-2N” registrò un picco di protoni solari aventi un'energia compresa fra 1 e 5 MeV. Il massimo di 66,22 conteggi/secondo si raggiunse fra le 17:22:00 e le 20:36:00. Alle 19:00:00 del 14 Dicembre, si registrarono ancora 48,3 conteggi/secondo; poi il fenomeno piano piano s'esaurì. Era un brillamento solare (solar flare in gergo) potenzialmente mortale per un astronauta che fosse stato lì. Il 22 Dicembre il rover venne parcheggiato a 1370 metri dal lander; Come sempre il coperchio protettivo venne richiuso. Nel secondo giorno lunare furono percorsi 1522 metri ed era proseguito il programma di analisi del suolo e di riprese panoramiche.
- 1971 -
| 3° giorno: 7-21 Gennaio |
Il 7 Gennaio sorse il Sole, come sempre venne alzato il coperchio protettivo e le batterie di bordo si ricaricarono. Così il 07.01 iniziò il 3° giorno lunare: il rover tornò verso il modulo di servizio abbandonato. Trovò un sasso che sembrava enorme dall'immagini, ma poi si rivelò molto piccolo: infatti il veicolo ci poté tranquillamente passare sopra. Qualche problema si presentava in corrispondenza del mezzogiorno locale: infatti l'assenza di ombre e di contrasti obbligò gli operatori a tenere fermo il robot. Il 17 Gennaio Lunokhod-1 era tornato alla "base" e riprese così alcuni panorami. Il 20 Gennaio, il rover venne parcheggiato ed il suo coperchio richiuso.
|
(21) |
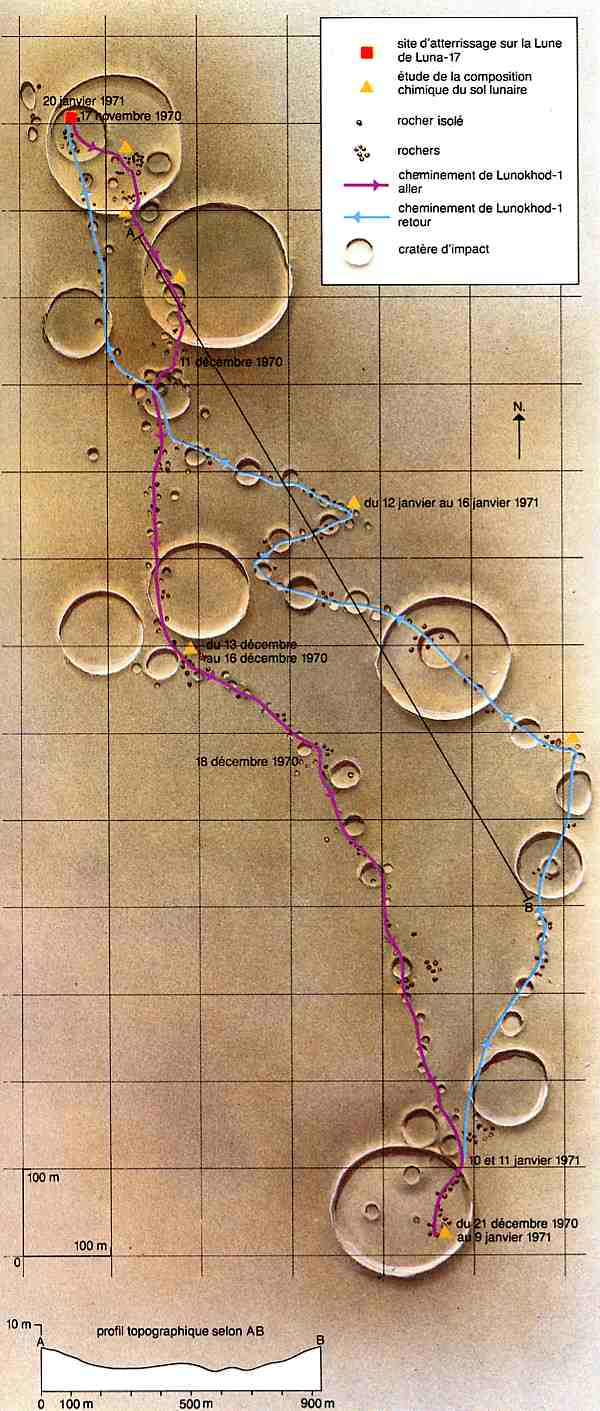 |
Il tragitto compiuto da Lunokhod-1 fra il 17.11.1970 al 20.01.1971
| 4° giorno: 7-20 Febbraio |
Nel terzo giorno lunare (7/12 Gennaio), il veicolo aveva percorso altri 1936,08 metri. Il 7 Febbraio sorse il Sole, le batterie furono ricaricate ed iniziò il 4° giorno lunare (il primo oltre il termine di giorni previsti). Il 10 Febbraio ci fu un'eclisse lunare, la temperatura crollò di 288 °C (dai +108 ai -180 °C) poi tornò come prima nel giro di qualche decina di minuti. Il rover dopo aver percorso 1536 metri, venne "parcheggiato" il 19 Febbraio ad un chilometro dal lander. Il 20 Febbraio l'agenzia di stampa sovietica TASS annunciò il completo svolgimento della missione nominale. In quattro giorni lunari (17.11.1970 - 19.02.1971) il veicolo semovente aveva percorso 5228 metri.
| 5° giorno: 7-20 Marzo |
Nel quinto "giorno", il veicolo semovente lunare percorse gran parte del perimetro di un cratere (diametro: 500 metri). La distanza coperta da Lunokhod-1 fu di 2004 metri.
| 6° giorno: 6-20 Aprile |
Il sensore D3 (quello delegato alle particelle alfa) non funzionò quasi mai. Fra le poche misurazioni fatte, spicca il massimo conteggio/secondo di 2,53 registrato alle 21:18:04 del 6 Aprile. Il 7 Aprile si ebbe un altro brillamento solare: 24,43 [conteggi/secondo] di protoni (1-5 MeV) alle 16:01:09 e 16:01:40.
Il 12 Aprile Lunokhod-1 cadde in un cratere che aveva bordi friabili e scoscesi. La situazione era delicata: lo slittamento delle ruote raggiungeva il 90% e la pendenza del cratere si attestava sui 24°. L'unico modo per uscire da quel cratere era chiudere il coperchio e dare il massimo della potenza a tutti i motorini elettrici. Ma con il coperchio chiuso i pannelli solari non potevano più produrre energia. Il rischio da correre era enorme: se la batteria si fosse scaricata la missione sarebbe finita lì. Così i controllori da terra agirono secondo un preciso piano: caricarono completamente la batteria, chiusero il coperchio e tennero al massimo della potenza tutte i motorini elettrici delle ruote. Fortunatamente il rover uscì dal cratere e continuò la sua missione estesa.
Nel sesto giorno lunare Lunokhod-1 percorse 1029 metri. Nei successivi giorni lunari continuarono l'analisi del suolo e le riprese televisive. Naturalmente le prestazioni del rover cominciarono a degradarsi. Inoltre un guasto al freno di stazionamento faceva avanzare il piccolo veicolo semovente come se avesse il "freno a mano tirato".
| 7° giorno: 6-20 Maggio |
Furono percorsi solo 197 metri. Dalle 23:09:02 del 15 Maggio, per quasi tre mesi (fino alle 22:38:51 del 13 Agosto), il sensore D2 non fornì alcuna informazione scientifica.
| 8° giorno: 4-11 Giugno |
Nell'ottavo "giorno" Lunokhod-1 percorse 1559 metri. Per prolungare il più possibile la missione estesa, dal 18 Giugno tutte le "letture" sullo stato dei vari sistemi di supporto del rover furono terminate.
| 9° giorno: 3/17 Luglio |
Nel nono "giorno" il rover percorse appena 220 metri.
| 10° giorno: 2-16 Agosto |
Durante decimo "giorno" il robot semovente percorse altri 215 metri. Il 5 Agosto gli astronauti Scott, Irwin e Worden (che erano sul modulo di comando dell'Apollo 15) videro scintillare il rover sotto il Sole da una distanza di circa 900 km.
| 11° giorno: 31 Agosto-15 Settembre |
Durante l'undicesimo giorno il rover percorse soltanto 88 metri. L'ultimo dato del contatore di raggi cosmici fu raccolto alle 10:01:58 del 14 Settembre. L'ultima sessione di comunicazione con Lunokhod-1 terminò circa 3 ore dopo (alle 13:05 circa).
Il 15 Settembre la TASS annunciò che la temperatura all'interno del compartimento pressurizzato era caduta nella notte. Ormai le pastiglie di polonio 210 si erano esauriti. La notizia che il rover fu "parcheggiato" in una posizione tale da poter usare ancora il riflettometro laser dovrebbe essere falsa, poiché questi era guasto dal Dicembre 1970.
Il 30 Settembre iniziò il dodicesimo giorno lunare: ma ancora nessun segnale proveniva dal Lunokhod-1. Il 4 Ottobre, nel quattordicesimo anniversario del lancio dello Sputnik, i controllori a terra annunciarono che non avrebbero più tentato di ripristinare il collegamento radio. Quindi la missione dopo 301 giorni, sei ore e 37 minuti era da considerarsi ufficialmente conclusa.
|
(22) |
|
|
Un'immagine da dove si notano le tracce lasciate dalle ruote sul terreno (lato sinistro)
Negli 301 giorni 6 ore e 67’ d'attività (distribuita in 116 sessioni) Lunokhod-1 percorse un totale di 10.540 metri, riprese almeno 20.000 immagini di guida e 206 panorami e "mappando" così ben 80 km². Inoltre effettuò 500 misure meccaniche del suolo e 25 analisi con il RIFMA.
La roccia superficiale era un basalto lavico coperto di regolite. Il terreno analizzato era molto simile a quello dei campioni riportati dall'Apollo 12: infatti era povero di alluminio (7%), titanio (< 4%) e potassio (1%), ma un poco più ricco di calcio (8%) e ferro (12%); l'elemento più diffuso rimaneva il silicio (20%). Infine grazie all'esperimento laser fu calcolata la distanza Luna-Terra con un errore di ± 3 metri.
|
(23) |
|
|
Un equipaggio ritratto nel museo dedicato alla missione al centro spaziale di Galytsino (30 km da Mosca)
Aleksandr L. Kemurdzhian, capo progettista del primo rover automatico lunare, è morto il 24 Febbraio 2003 nella sua casa di San Pietroburgo; era nato il 4 Ottobre 1921 a Vladykavkaz dal 1998 si trovava in pensione.
RINGRAZIAMENTI:
Vorrei ringraziare l'amico Paolo Ulivi per avermi raccontato alcuni aneddoti (vedi il rover con il "freno a mano tirato" e il riflettometro laser usato solo due volte). Inoltre ha risposto esaurientemente e pazientemente alle mie tante domande a proposito di questa missione. Ad esempio mi ha aiutato a tradurre le voci in tedesco dello schema (8). Dallo stemma commemorativo (1) Paolo ha trascritto i testi dal cirillico e li ha tradotti in italiano. Inoltre ha chiarito, al sottoscritto ed un altro utente, le circostanze in cui gli astronauti dell'Apollo 15 riuscirono a vedere lo scintillare del Lunokhod-1. Infine Paolo Ulivi mi ha comunicato l'esatta ubicazione di Zvezdonoy Gorodok (la "Città delle stelle"). Infine vorrei ringraziare Alberto per avermi fornito le foto (4) e (8) e le loro fonti. Anche se ormai sono monotono, vorrei ancora ringraziare Paolo Ulivi, che ha trovato un archivio NASA ricchissimo di documenti PDF davvero interessanti. Fra questi c'è il “Challenge to Apollo: the Soviet Union and the space race, 1945-1974” di Asif A. Siddiqi [LINK] che mi ha permesso di comprendere molto meglio la corsa dell'Unione Sovietica nello spazio. Senza questo documento, indicato da Paolo, non avrei potuto aggiornare questa ed altre schede d'astronautica. |
NOTA: Le foto 17), 18), 19) e 21) sono bordate in giallo perché "linkano" alle corrispondenti immagini ad alta risoluzione.
|
FONTI, RIFERIMENTI, LINK DEL MATERIALE UTILIZZATO PER QUESTA SCHEDA |
x DISEGNI, SCHEMI, MAPPE, FOTO:
- foto (1): LINK;
- schema (2): LINK;
- disegno (3): LINK;
- schema (4): LINK;
- foto (5): LINK;
- schema (6): LINK;
- foto (7): LINK;
- foto (8): LINK;
- foto (9): LINK;
- foto (10): LINK;
- foto (11): LINK;
- foto (12): LINK;
- disegno (13): LINK;
- disegno (14): LINK, vedi nota 1;
- mappa (15): LINK;
- mappa (16): LINK;
- foto (17): LINK;
- foto (18): LINK;
- foto (19): LINK;
- foto (20): LINK;
- mappa (21): LINK;
- foto (22): LINK, vedi nota 2;
- foto (23): LINK.
Nota 1: dato che il disegno conteneva del testo in francese, mi sono permesso di cancellarlo. Inoltre il disegno era contenuto in un unico elemento grafico; così ho dovuto ritagliarlo.
Nota 2: dato che la foto era contenuta in un unico elemento grafico, ho dovuto necessariamente ritagliarlo.
x il TESTO:
• National Space Science Data Center, luna1969a (Luna-1969A);
• National Space Science Data Center, 1970-095A (Luna-17);
• National Space Science Data Center, Spacecraft data - LINK (Luna-17);
• Space.40, 1970-095A [NB: testo in ceco];
• AstroLink.de, LINK [NB: testo in tedesco];
• Bernd-leitenberger.de (“Das Luna programmm”), LINK [NB: testo in tedesco];
• Epizodsspace.narod.ru, Biblioteka, 1972 - LINK [NB: testo in cirilico];
• Deep Space Chronicle, 1969 - LINK [file .PDF];
• Deep Space Chronicle, 1970 - LINK;
• Paolo Ulivi (“L'ESPLORAZIONE DELLA LUNA”, 28.12.2002) | pagg. 199-201, 205-209;
• Homepage of Don Mitchell (“The soviet exploration of Venus”, “Remote scientific sensor”), LINK;
• Homepage of Don Mitchell (“The soviet exploration of Venus”, “Soviet space cameras”), LINK;
• Homepage of Don Mitchell (“The soviet exploration of Venus”, “Soviet telemetry system”), LINK;
• Homepage of Don Mitchell (“Soviet Moon Images”), LINK ;
• Gran Tour! (“Object E”), LINK;
• Zarya (“Lunokhod-1”), LINK;
• Zarya (“Exploring the moon”), LINK;
• Zarya (“1969 Space Activities”), LINK;
• Zarya (“1970 Space Activities”), LINK;
• Encyclopedia Astronautica (“Luna Ye-8-5”), LINK;
• Encyclopedia Astronautica (“KTDU-417”), LINK;
• Encyclopedia Astronautica (“KTDU-417-B”), LINK;
• Aeronautics.ru (“Russian space engines: Russia”), LINK;
• Home.earthlink.net (“A. M. Isatev”), LINK;
• Planer4589.org (“Russian engines”), LINK;
• Space.hobby-ru, (“Lunokhod -1”), LINK [NB: testo in cirilico];
• Laspace.ru, (“Luna-17”), LINK [NB: testo in cirilico];
• Engineering Colloquium Home Page, LINK;
• Espacial.com (“Piloto de Lunakhod”), LINK;
• The electonic journal of astronomical society of the Atlantic:: volume 4, number 12 - July 1993 ('jasa9601.txt'), LINK;
• Sven's space place (“The radio system of the Luna-15-24 series”), LINK;
• Sven's space place (“Notes on the design and flight profile of the Luna-15-24 series”), LINK;
• Sven's space place (“Space Frequency Listing, 700-1600 MHz, Downlink”) - LINK;
• Sven's space place (“The Soviet/Russian Deep Space Network”) - LINK;
• Royal Aircraft Establishment table of satellites, 1970 - LINK [file .DOC];
• Phisycs.ucsd.edu (“Lunar Retroreflectors”) - LINK;
• The lunascan project moon shot series (“Luna-17”), LINK;
• Asif A. Siddiqi, (“Challenge to Apollo: the Soviet Union and the space race, 1945-1974”), pagg. 547-550, 658-660, 758-759; LINK [file PDF · 64,3 MB · 1034 pagine].
|
|
Luna-16 |
|
|







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}